作品展示
作品展示 > C类:企业出题类 > C5智能产地初加工农业装备发明
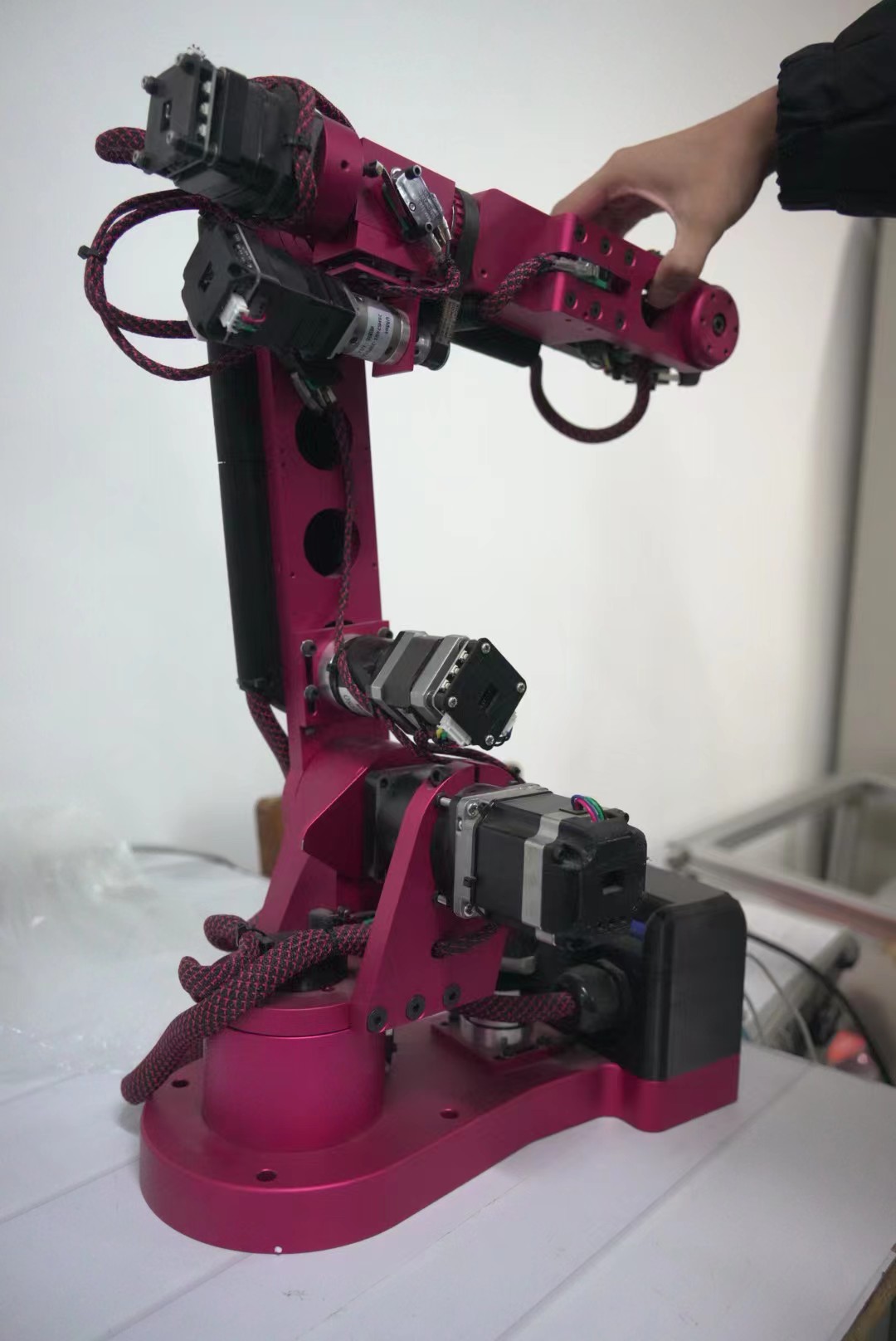
“精准捕获”-实现有蒂蔬菜的有序摆放
- 作品编号:2023C1294
- 所属领域:C5智能产地初加工农业装备发明
- 作品层次:本科生
- 所在高校:西安工业大学
- 所在院/系:机电工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:0.1万元
作品简介:
机器主要通过视觉传感器和机械臂的协同工作,通过颜色区分有蒂蔬菜的头尾,以实现蔬菜的有序摆放。当蔬菜从传送带上经过时,视觉传感器会捕捉目标物的图像,再通过传感器将光信号转化为数字图像后,对图像进行预处理从而降低噪点。将预处理过的的目标图像传输到电脑中,在电脑上通过MATLAB进行编码,对所需识别的目标色块进行提取,代码会将该信息传输回机械臂从而实现进一步的抓取动作。机械臂控制系统将计算出目标位置和姿态转化为机械臂的关节控制命令。而后通过机械臂抓,将蔬菜移动到目标位置,并将其有序地摆放在那里。在整个摆放过程中,视觉传感器可以提供实时反馈,以确保物品被准确摆放在目标位置。
主要创新点:
对于传统工业生产过程中机械臂需要按照固定路线固定方式工作的问题,该机器与传统工业中的机械臂在提前设定好的运动轨迹工作的方式有所不同,融合机器视觉的机械臂工件自主抓取系统拥有自主抓取物体的本领。在工业自动化领域,基于视觉识别技术的机械臂可以用于物体分拣、抓取过程自动化和质量检测等方面。通过视觉识别技术,机械臂可以准确地识别和抓取物体,实现高效、准确的自动化生产线。
技术关键和主要技术指标:
1:利用工业相机,采集目标彩色图像与深度图。
2: 通过角点曲率的目标区域提取算法,在采 集的目标彩色图像与深度图内,提取机械臂抓取目标区域。
3:在matlab中编写程序对相机提取的图片进行颜色的数学建模分析。
4:通过 Guide 滤波结合漫水填充的预处理 方法,分别在彩色机械臂抓取目标区域以及深度机械 臂抓取目标区域内,提取目标轮廓以及目标轮廓像素 点。
5: 通过迭代最近点法对彩色图像的目标轮 廓像素点与深度图的目标轮廓像素点进行图像配准, 得到目标旋转矩阵与平移矩阵,确定目标的抓取位置。
6:基于Pytorch对运行环境搭建,选用VMRD数据集作为实验数据集,实现视觉操作关系推理,并可以获取场景下的操作关系树,ROI检测提取结构:使用Cascade R-CNN级联网络实现物体的目标检测,特征提取后通过抓取提议网络得到潜在ROIs,再进入级联网络中完成目标检测。抓取检测结构FCN:使用旋转矩形锚框预测物体的可行抓取框。将训练完成的模型算法移植到机械臂上,让机械臂完成对多个物体的抓取
推广应用价值:
该机器可以精确地执行任务,这不仅保证了食品的安全性,也有助于满足消费者对食品卫生的高要求。随着消费者对个性化需求的增加,蔬菜有序摆放机器人可以通过程序调整,根据不同的需求进行个性化的蔬菜摆放。既可以满足消费者的个性化需求,也能提高企业的服务水平。将会极大地改变传统农业的劳作模式,降低了对大量劳动力的依赖,能够有效的提高蔬菜分拣的效率,帮助果蔬企业更好的抢占市场,实现从传统农业向现代农业转变。
作品视频: