作品展示
作品展示 > D类:概念设计类 > 智能农业装备整机造型设计
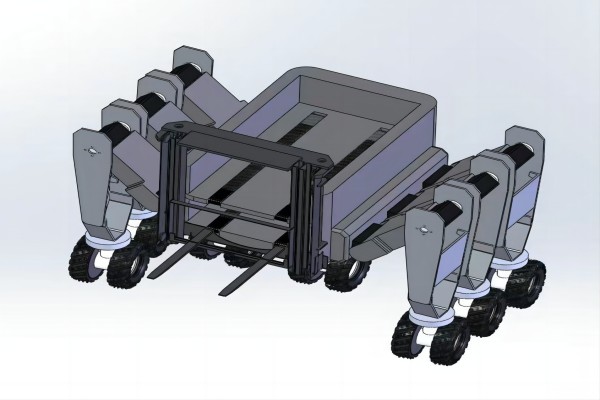
智能搬运机器人
- 作品编号:2023D2191
- 所属领域:智能农业装备整机造型设计
- 作品层次:本科生
- 所在高校:石河子大学
- 所在院/系:机械电气工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:虚拟概念模型
- 制作成本估算:3.35万元
作品简介:
智能搬运机器人是一款集机器学习和物联网技术为一体的智能农业机器人,其采用仿生六足技术,专为农田、丘陵地形水果及蔬菜运输而设计。本设计根据丘陵山地及复杂地块,常规搬运车难以进入、人工搬运强度大等问题,探索设计了一种新型的智能搬运农业机器人,它采用了六足行走模式,腿部具有多个自由度使运动的灵活性大大增强,可以根据地形和障碍物的变化自动调节步幅和方向,以适应不同的地形和环境,避免轮式或履带式机器人在泥泞或不平坦的地面上陷入或翻倒的风险,且对土地碾压小。此外,该设计中的机器人装备高清摄像头、激光雷达和无线通讯模块,能够智能避障和主动寻址,作业时能实时采集和传输农田的图像和数据,与远程控制中心或其他机器人进行交互和协作,实现机器人的智能、自动运输。
主要创新点:
1. 复杂地块自适应性,采用六足轮且距可调行走模式,适应不同地形和环境,采用仿生学轮式轮胎避免在泥泞或不平坦的地面上陷入或翻倒的风险。
2)人机协同作业:配备叉车模块和传送带模块,配合RFID技术可以实时监测货物状态,可实现自装卸货全自动化,物流全信息化。配备高清摄像头、激光雷达,实现搬运机器人智能识别、智能避障,通过无线通讯模块,实时采集和传输农田的图像和数据,实现远程监控和协作。
技术关键和主要技术指标:
关键技术:
1)机器学习技术:通过深度学习技术,使机器更好的适应农田环境,提高工作准确度。
2)物联网技术:将放置在农田中的各种设备、传感器和机器人进行联网和信息交互,提高数据准确性和机器人效率。六足行走技术:该技术基于仿生学,旨在使机器人在农田中拥有更好的地形适应性,机动性和操作精度。
3)智能感应和导航技术:可识别农作物的种类、生长情况和位置,根据预设的程序或指令进行合理的操作。
设计理念:
1)智慧农业:利用机器学习和物联网技术,根据农作物的种类、生长情况和位置。
2) 智能农业:机器人能根据导航技术进行自动路径行走;根据智能图像识别技术,实现动主避障和田里待运蔬菜的识别。实现农田蔬菜、瓜果的自动收集和智能运输。
3)可持续农业:机器人采用仿生学的轮胎,减少对土地的碾压,保护土地;行走轮可以根据厢地宽度自适应调节两边的轮距,不碾压蔬菜,保护菜地的完整性。
推广应用价值:
1.应用场景多,对土地破坏小;目前市场上的搬运机器人大多使用履带或轮胎进行行进,这种设计并不适合田间作业,相比之下六足智能搬运机器人可以跨越障碍物,根据地形和障碍物的变化自动调节步幅和方向,实现稳定和灵活的行走,更加适应农田环境作业。
2.性价比高,功能多;该机器人造价便宜,作业效率高,最大负载500kg,单次搬运可抵5个工人效率,通过加载不同模块可实现喷药、施肥等多种作业功能,且动力源为纯电动更加环保,市场前景可观,经济效益显著。
作品视频: