作品展示
作品展示 > D类:概念设计类 > 智能农机和智慧农业创意设计
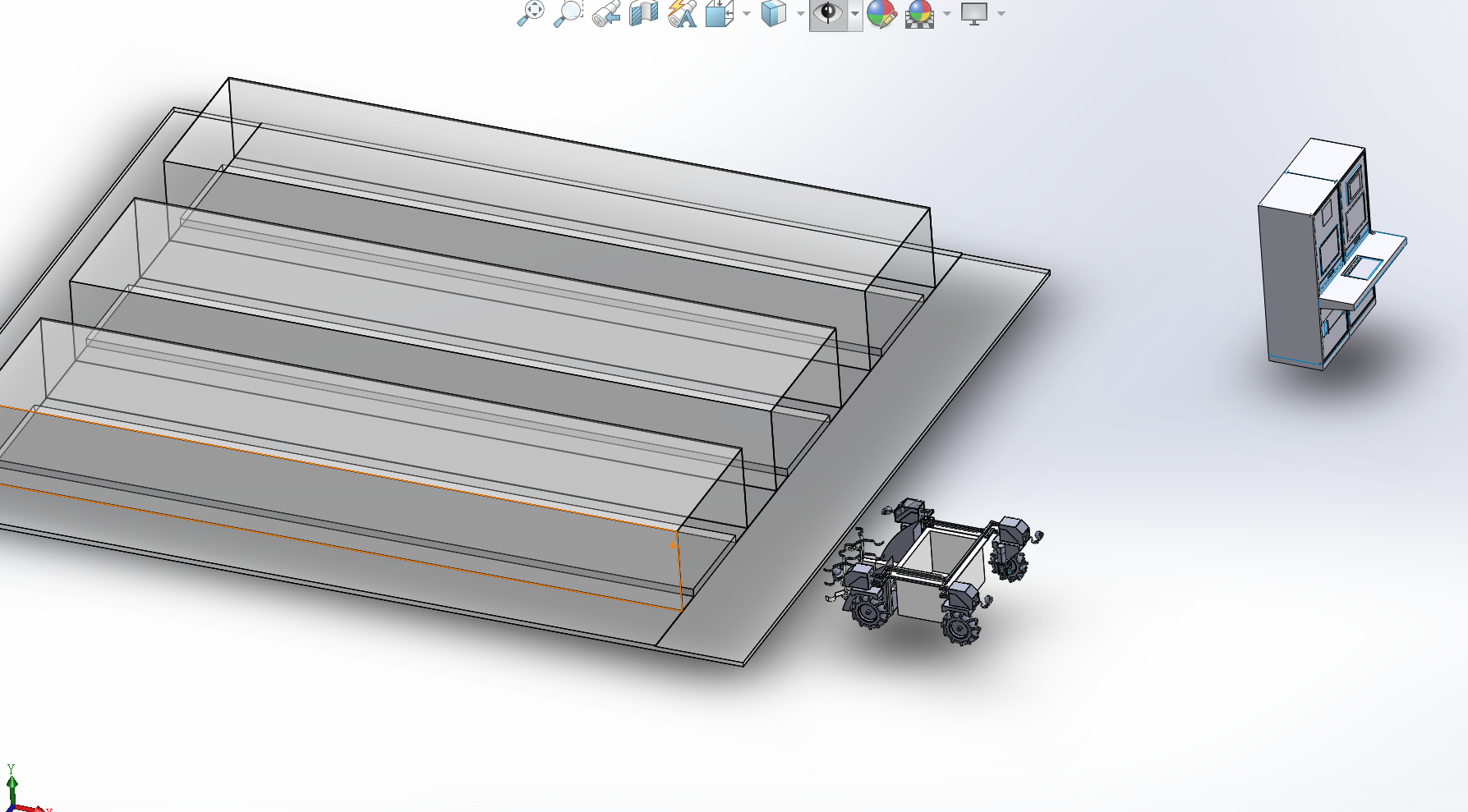
暗境韭黄自动收割捆绑及培养环境检测视觉机器人
- 作品编号:2023D2211
- 所属领域:智能农机和智慧农业创意设计
- 作品层次:研究生
- 所在高校:重庆科技学院
- 所在院/系:机械与动力工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:虚拟概念模型
- 制作成本估算:1500万元
作品简介:
韭黄的种植条件需要在一定程度的遮光条件下进行,本设计旨在提供一种节省韭黄种植空间、降低种植成本并改进种植环境的解决方案。它不仅能够实时监测种植环境的数据,还能将这些信息以可视化的方式反馈给种植者,帮助他们更有效地培育韭黄。 采用韭黄机器人技术,能够在特定环境中智能完成韭黄的收割、捆扎和封箱工作,同时监测棚内种植环境的各个因素,包括土壤湿度和韭黄生长高度等。该系统的目标是降低韭黄的种植成本,同时实现农场的标准化管理。
主要创新点:
这种创新的设计集成了智能监测技术,将实时环境数据可视化以化的方式引入,采用网格机器人自动完成韭黄的收割、捆扎和封装,同时通过环境参数监测和智能管理,自动调整种植条件,从而降低韭黄降低种植成本、提高生产效率,推动农场实现自动化和可持续农业生产。
技术关键和主要技术指标:
包括传感技术、数据采集和传输技术、数据分析和人工智能、可视化技术、机器视觉和机器人技术、自动化控制系统、物联网技术、精准农业技术、以及包装和运输技术综合运用这些技术,可以实现韭黄种植的自动化、自动化和高效化,从而降低成本、提高产量,同时减少资源浪费,促进农场的可持续发展。
推广应用价值:
对种植者而言,此技术有助于实现初期资金投入的有效节省,减少劳动力成本,实现农产品生产的智能高效化,从而最大程度减少后期投入时间与资源。
对消费者而言,此技术应用可带来韭黄产品价格的更具竞争力,而且更为品质卓越。
作品视频: