作品展示
作品展示 > C类:企业出题类 > C2智能种植农业装备发明
基于深度学习的蔬菜育苗穴盘播种漏播检测模型及实时补种装备
- 作品编号:2024C3265
- 所属领域:C2智能种植农业装备发明
- 作品层次:研究生
- 所在高校:吉林大学
- 所在院/系:生物与农业工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:实物模型
- 制作成本估算:3万元
作品简介:
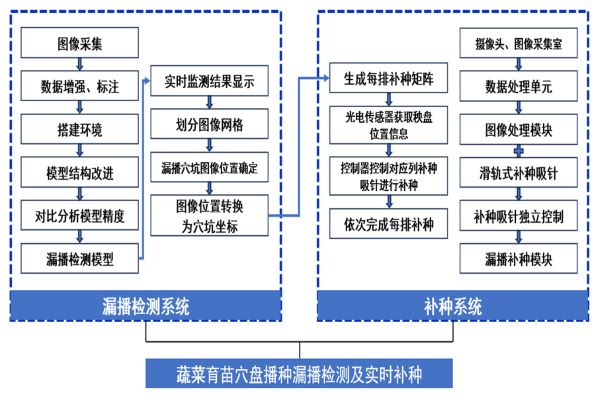
育苗作为蔬菜生产中的关键环节,其高效智能的机械化穴盘育苗是提高蔬菜生产综合效益的关键技术。针对现有蔬菜机械化育苗过程中漏播检测与补种环节智能化程度低的问题,本项目拟基于Yolo系列目标检测算法,构建可适用于不同种子类型与种子处理方式的多工况通用漏播穴坑检测模型,结合漏播穴坑定位方法、辅助定位机构、补种装置及其控制系统研究,实现蔬菜育苗穴盘播种过程的全自动漏播检测与补种作业。
主要创新点:
基于改进Yolo模型的蔬菜育苗穴盘漏播穴坑识别方法。传统机器视觉检测通过像素方法对图像进行处理,划分掩膜并根据连通域像素面积对播种情况进行判断,检测速度较慢。以Yolo为代表的目标检测模型在检测精度和速度上效果较好,可为本项目研究提供借鉴。本项目拟基于Yolo系列模型,以不同种子类型与种子处理方式下育苗穴盘播种后穴坑为研究对象,通过对模型结构改进、轻量化研究,以提高模型的检测精度和效率,实现对秧盘复杂背景下漏播穴坑的精准识别。
技术关键和主要技术指标:
1、多工况通用漏播穴坑精准识别模型。漏播检测模型是后续补种作业执行依据,在实际模型构建过程中,种子类型会影响秧盘规格选取和压坑深度,基质、种子处理方式、种子掉落至穴坑时的位姿均会影响穴坑形貌特征,以上均增加了合格和漏播穴坑图像数据处理的复杂度,因此构建漏播穴坑精准识别模型是本项目的第一个关键技术。本项目拟通过对不同种子类型和处理方式在成品基质下播种后穴坑图像数据进行采集、标注、训练和验证,基于Yolo系列目标检测算法,构建漏播穴坑精准识别模型。
2、漏播穴坑定位与补种联动控制系统。播种作业为流水线作业,秧盘始终处于移动状态,补种装置作业时机直接关系补种作业的精准度,因此漏播穴坑定位与补种联动控制系统研究是本项目的第二个关键技术。本项目拟在传统吸针式播种装置基础上,对每个吸针气吸负压通过单个电磁阀控制,基于传送带速度、漏播穴坑坐标、吸针取种速度构建补种作业控制算法及系统,实现漏播穴坑的精准补种作业。
推广应用价值:
本项目通过蔬菜育苗穴盘播种作业环节全自动漏播检测和补种装置研究,可缓解传统人工检查补种劳动强度大、效率低的难题,在节约生产成本的同时,改善育苗穴盘播种质量和效率,提高种子发芽率和秧盘利用率,有利于秧苗后续培育和移栽,对提高作物产量和质量和传统机械式蔬菜育苗穴盘播种设备智能化程度、促进穴盘育秧技术的推广与发展意义重大。
作品视频:
no video files