作品展示
作品展示 > C类:企业出题类 > C4智能收获农业装备发明
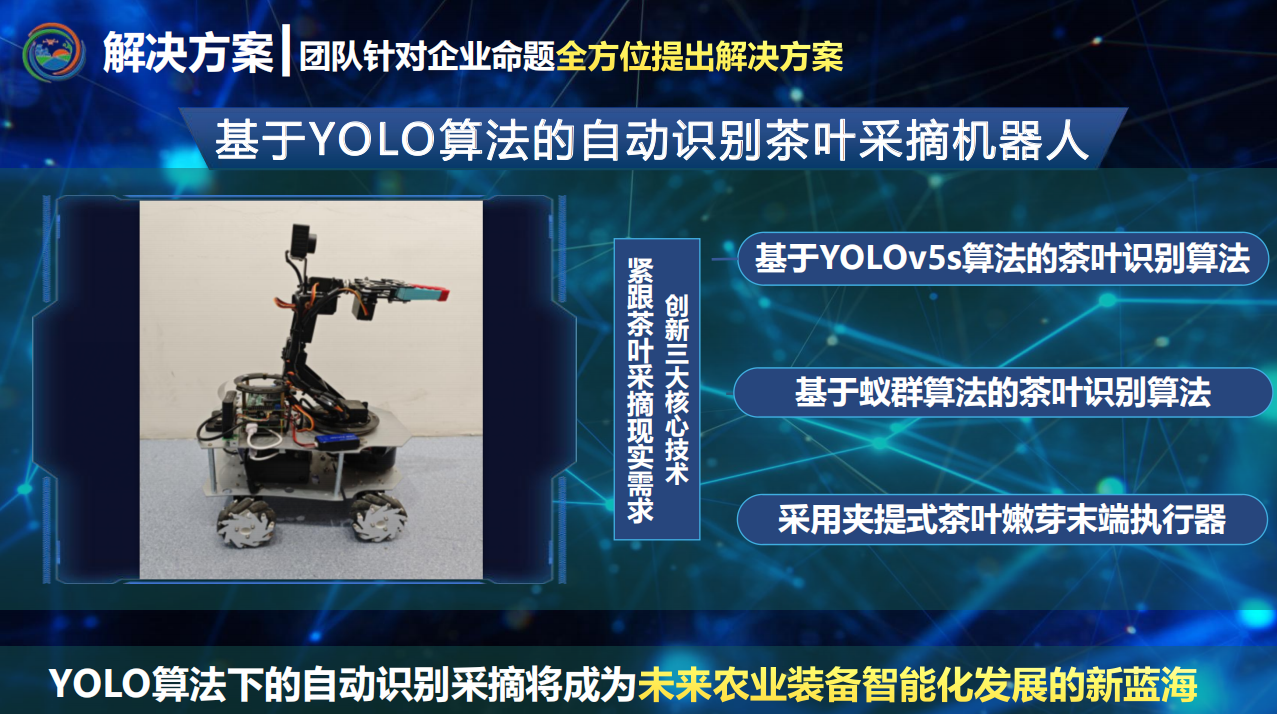
驭茶先锋——基于YOLO 算法的自动识别茶叶采摘机器人
- 作品编号:2024C3514
- 所属领域:C4智能收获农业装备发明
- 作品层次:本科生
- 所在高校:中北大学
- 所在院/系:仪器与电子学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:虚拟概念模型
- 制作成本估算:0.5——1.0万元
作品简介:
“驭茶先锋茶采摘机器人”项目旨在解决茶叶采摘业中日益凸显的劳动力短缺和效率低下的双重问题。通过巧妙地融合YOLO算法,蚁群算法等前沿技术,本项目致力于研发一款实用性的机器人,它能够自主地识别、定位并精准采摘茶叶。该项目不仅仅是一个简单的技术集成,更是一个全面的系统工程,它涵盖了机器人的系统设计、视觉识别算法、导航规划以及采摘执行机构的优化等多个方面。
主要创新点:
主要体现在茶叶识别的算法上,并有语音识别能,使采摘过程更便捷化,智能化,平稳化,高效化。此外在机器人的顶部安装有机械臂和机械爪,机械爪有多种类型,可以根据所需自行更换,通过指令控制,可以自主抓取茶叶,并且中间位置设置储物仓,以及自动仓门。可一次性存储多数茶叶,提高采摘效率,方便快捷。
技术关键和主要技术指标:
本款机器人的核心研究内容是识别技术。基于YOLO算法和蚁群算法,搭配末端执行器实现对农作物的准确识别与采摘。提出了一种改进 YOLOV5s 的嫩芽识别算法,提升了检测性能,本项目提出的茶叶嫩芽识别模型和双目视觉定位采摘系统集成后能够较好的完成识别、定位、采摘要求,验证了机器人采摘平台的可行性。完成对嫩芽的三维坐标的计算并运用改进蚁群算法对经过嫩芽识别模型和定位算法后的三维坐标进行采摘路径规划,使得机械臂采摘完视场中的嫩芽所移动的总路程最短,提高茶叶嫩芽的采摘效率,减少采摘时间。
推广应用价值:
随着人们对于生活品质的提升,茶叶的市场需求量不断上升,而茶产量不能有效提升将严重限制茶产业的发展。 茶采摘目前仍以人工为主,机械设备目前仅仅应用于局部地区的大宗茶产业,而且采用现有的采茶机械进行采摘,所得到的茶叶仍无法达到名优茶品级的筛选标准。 因此,大力推进茶产业机械化、自动化以及智能化是进一步提高茶叶产量和品质的发展要求。智能化采摘不仅能够降低劳动成本和劳动强度,而且还能减少漏采、乱采现象,提高茶叶的品质以及产量。
作品视频: