作品展示
作品展示 > C类:企业出题类 > C2智能种植农业装备发明
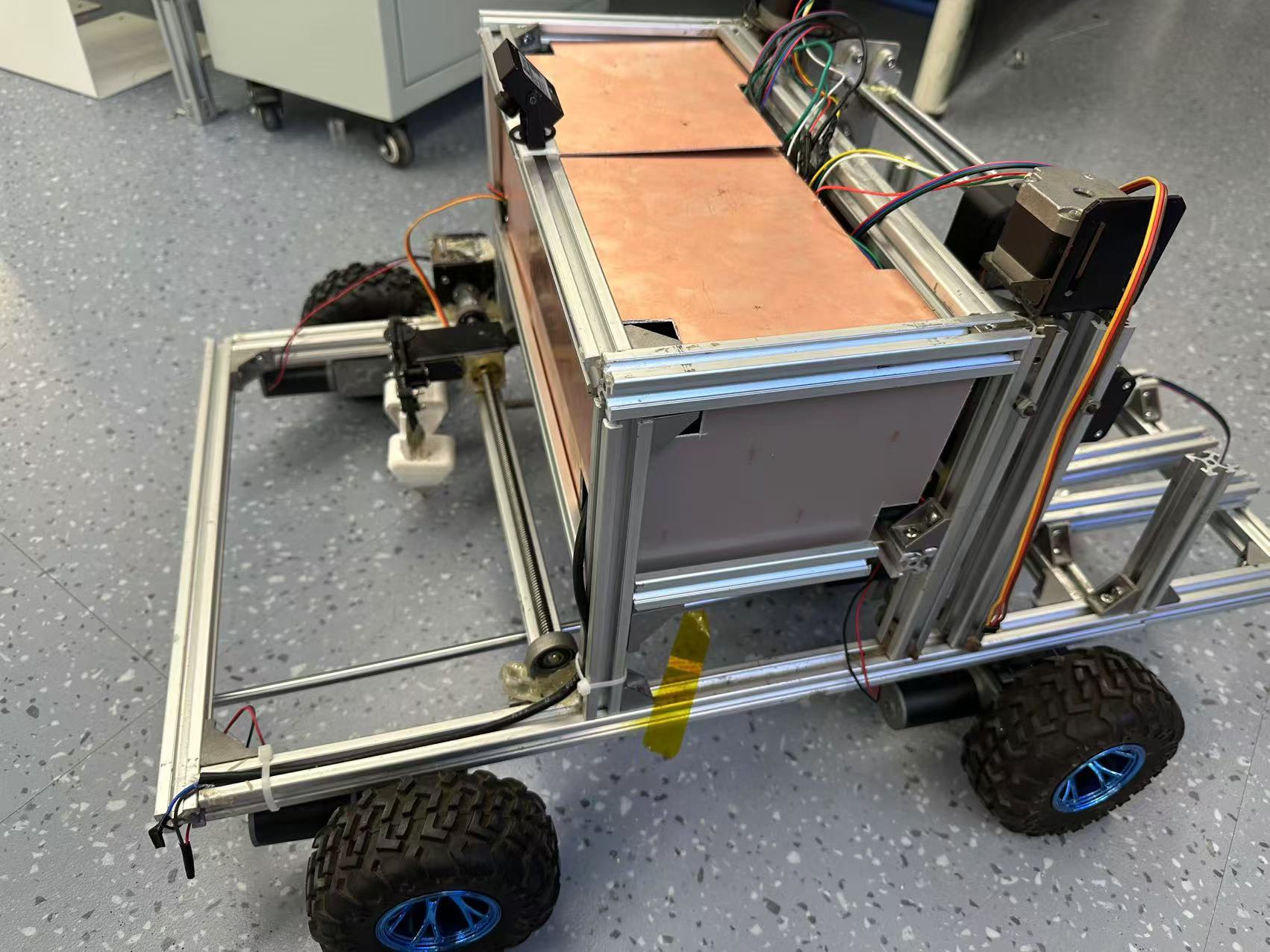
温室大棚坏株自动移栽机
- 作品编号:2024C3722
- 所属领域:C2智能种植农业装备发明
- 作品层次:本科生
- 所在高校:青岛黄海学院
- 所在院/系:智能制造学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:样机
- 制作成本估算:0.21万元
作品简介:
现今补苗方式以人工补苗为主,对种植业进行了补苗调查,发现补苗过程中植株行距分布不均。为了将株距控制在10-20cm以及提高移栽效率,设计出一种自动取苗、密植移栽且轻便的全自动装备。补苗机器人主控芯片为STM32F103C8T6微处理器,摄像头检测枯苗和缺苗并向控芯片传递信号,GPS定位保证机器人按照预定运行。挖土、覆土、移栽幼苗为同一装置,巧妙地减少了空间,装幼苗的装置可以通过丝杆带动,方便抓手抓取幼苗。该机器人采用减震轮胎并且在前面加上驱除物块装置,保证补苗机器人高效运行。该装置有效的提高了补苗效率,控制了植株间的行距,减少土地资源浪费。
主要创新点:
(1)MobileNetv2算法能较精准的识别病株,成功率达到82.23%能有效的为移栽做准备。
(2)设计选用机械舵机手臂进行移栽幼苗,根据机械手臂张开的大小,可以实现多种类幼苗的移栽。机械手臂上加上海绵缓冲装置,防止过大夹力破坏健康的幼苗。
(3)运用合金机械抓和覆土铝板件进行刨土和覆土。
技术关键和主要技术指标:
该补苗机器人由CCD摄像头信息识别装置、移栽装置、传送装置、存放装置、控制系统、GPS定位、缓冲减压装置以及其它系统装置组成。其中CCD摄像头识别装置和移栽装置是整个实物设计的核心,最困难的是CCD摄像头信息识别传送到控制系[10],然后由控制系统控制移栽抓手实现空间移动,移栽装置是空间立体的,其设计是补苗机器人核心中的重点,它要求抓手能够上下左右前后进行空间移动和按照补苗位置要求实现精确定位移栽。
推广应用价值:
补苗机器人解决了植株行距分布不均以及蔬菜移栽机因体型过大的问题,提高移栽效率,为减少粮食进口提供不可或缺的作用,响应了国家高效利用土地资源的号召,是新时代自动化、大大的缩短了工作时间,从而提高了劳动生产率,具有很大的经济效益和广阔美好的前景。
作品视频: