作品展示
作品展示 > C类:企业出题类 > C5智能产地初加工农业装备发明
百香果自动化采摘器
- 作品编号:2024C3830
- 所属领域:C5智能产地初加工农业装备发明
- 作品层次:本科生
- 所在高校:广西大学
- 所在院/系:广西大学机械工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机,实物模型
- 制作成本估算:0.5万元
作品简介:
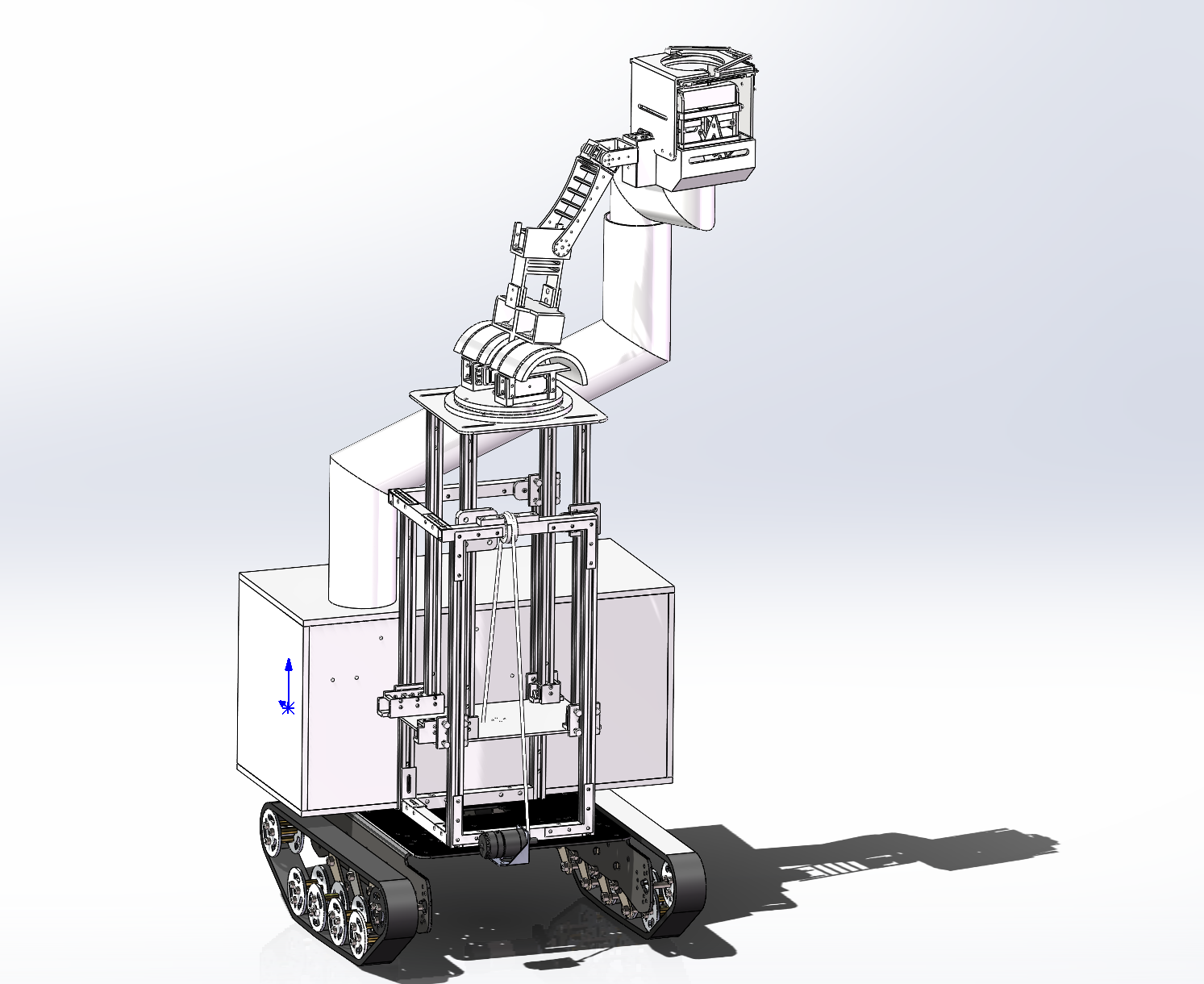
全自动百香果采摘装置采用夹具夹取和刀片剪切的机构设计,使用stm32f407控制板实现抓取和快速剪切采摘作业。装置具有抬升结构,可适应不同环境和高度需求的百香果采摘。
该装置由末端执行器、视觉定位装置、云台抬升机构、机械臂机构、分选装置和采集箱等部分组成。采摘分为两步完成:第一步,通过视觉识别定位到成熟百香果,机械臂和云台抬升装置收到指令移动至百香果前。第二步,两端舵机控制夹具对百香果进行夹取,巨大的扭矩促使刀片快速运动对果梗进行剪切作业。
STM32单片机编程控制电机和舵机实现“夹取定位—快速采摘”,具备智能采摘的功能,提高百香果人工采摘的效率。
主要创新点:
1、分步传动对采摘对象实现“先定位,后采摘”,合二为一。机器两个夹具对果实进行夹取,确保剪切和收集时果实的稳定。
2、舵机控制剪切刀片进行快速剪切,使采摘果实更轻松。
3、升降结构能使机器适应不同的百香果棚种植高度,使其在不同的高度不受限制。
4、导管直通收集箱,内部增加减速装置,使收集果实更简便并保护果实不在采摘收集过程中受损。
5、收集箱内置传送带从果实进口处开始,由窄至宽进行果实大小分选。
技术关键和主要技术指标:
1.视觉模块精准识别并定位目标,控制板对机器各个关节建立空间坐标系,通过平移变换和旋转变化实现空间坐标的转换,采用D-H参数法对机械臂正运动学或逆运动学分析求出各个关节的变量。
2.机械爪内置薄膜压力传感器,薄膜压力传感器能够针对不同大小的果进行无损害挤压,从而稳定果实,压力达到一定参数值后停止施压并进行对其果梗的剪切。
3.24V直流电机与钢丝绳配合保证整个机械臂的升降,多个大角度舵机组合成多个自由度实现对视觉所见领域内的全方位采摘。
推广应用价值:
全自动的百香果采摘,顺应了国家近年来对农业的政策,是农业机械化及其自动化的发展目标。能降低生产成本、减少人力物力的投入,提高效率。同时满足不同空间采摘需求,适合于大棚种植、丘陵地区户外种植的果实采摘。该装置利用各个机构的相互配合实现百香果高效采摘,达到不伤果、不伤藤的要求。在成本造价方面,该装置成本低、实用性强,且其市场空白,具有很大的推广价值,可以推广应用到橘子、苹果等其他水果采摘机械设计。
作品视频: