作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A7基础零部件(液压部件、传动系、传感器、电驱动、导航等)
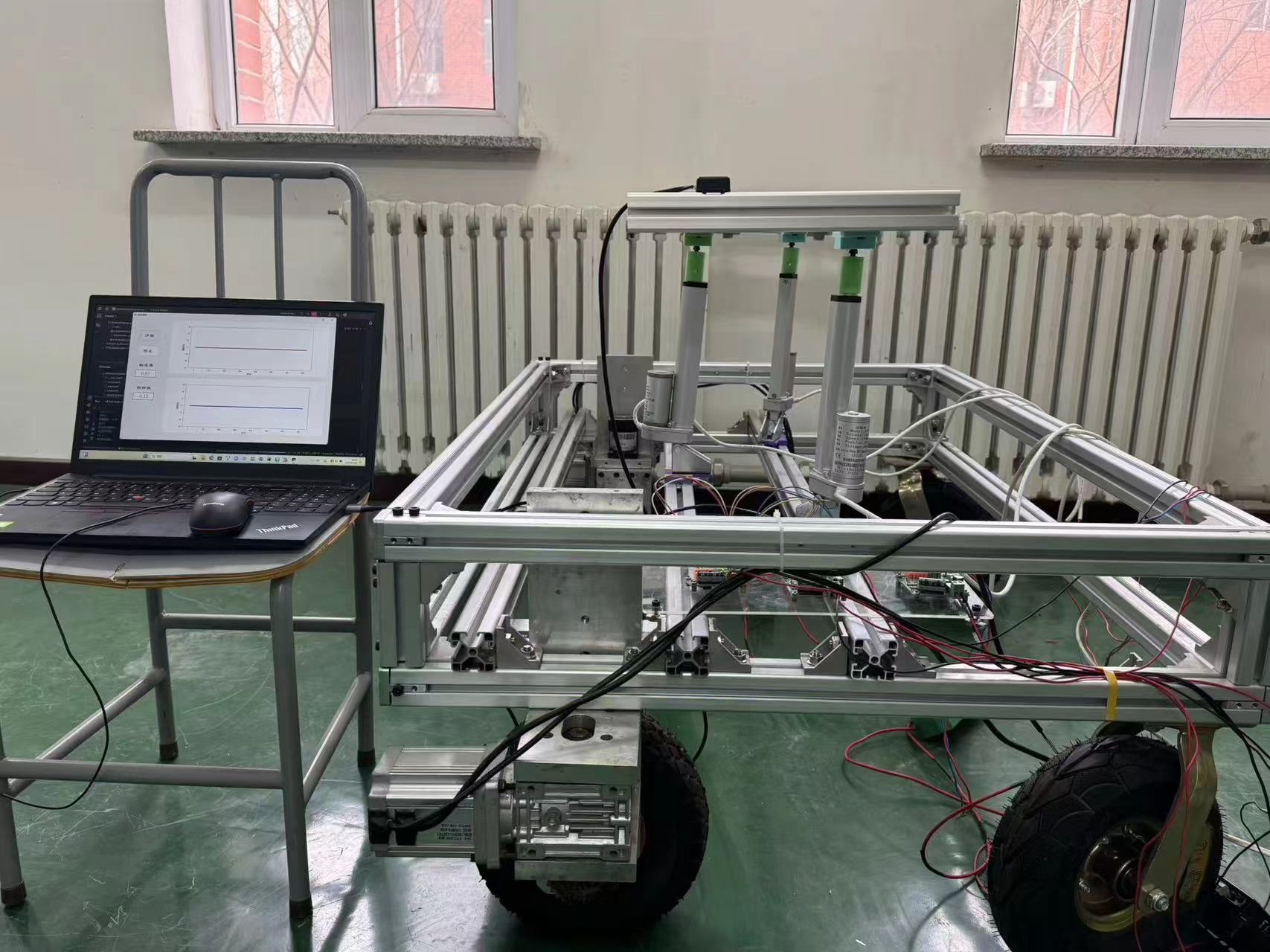
丘陵山地农机底盘自动调平系统
- 作品编号:2024A3885
- 所属领域:A7基础零部件(液压部件、传动系、传感器、电驱动、导航等)
- 作品层次:研究生
- 所在高校:沈阳农业大学
- 所在院/系:工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:2300万元
作品简介:
丘陵山地坡度特征明显,地面高度差大,致使农机作业时姿态不能始终与地面保持平行,严重影响机具作业质量。本项目研制了一种适用于丘陵山地的电驱动自适应调平底盘,采用三点支撑调平机构,底盘通过三个电动推杆安装在机架上,电动推杆与机架为圆柱铰接,与底盘为球铰接。三个圆柱铰链轴线交于一点,保证了底盘的稳定性。采用倾角传感器实时监测底盘倾斜姿态,上位机采用PC机,可以同步显示底盘角度变化,通过PID 控制器控制下位机输出PWM值及端口电平,调节电动推杆运行速度及方向,实现底盘自动调平,减小底盘的翻滚角和俯仰角,其精度和稳定性能够满足实际使用要求。
主要创新点:
1.采用了三点支撑调平机构,支撑点高度调整方便,结构简单,无虚支撑点,稳定性高,容易实现自动控制;
2.采用倾角传感器实时采集底盘翻滚角及俯仰角,通过PID控制算法计算电动推杆的PWM值及动作方向,上位机进行算法运行及底盘倾角实时监测,下位机控制电动推杆运动,实现动态调平。
技术关键和主要技术指标:
1.本作品采用逐高调平策略。当底盘为水平位置时,三个电动推杆均为缩回最短状态,以降低机具重心。通过倾角传感器采集底盘纵向和横向两个方向的倾角,由倾角大小及方向情况判断最高支撑点。调平阈值角度取1°,当底盘纵向及横向倾角绝对值不超过阈值时,三个电动推杆均不动作。当倾角绝对值超过阈值时,最高支撑点电动推杆不动作,通过PID算法控制其它电动推杆伸长,减小底盘倾角,实现底盘动态调平。
2.控制系统采用上位机和下位机相结合的方式。上位机采用Python语言编程,通过串口通信采集倾角传感器数据并进行实时显示,同时运行控制算法,判断底盘姿态,计算各电动推杆的PWM值发送到下位机。下位机采用STC12C5A60S2单片机,运算速度快,自带两路PWM输出,抗干扰能力强,通过串口与上位机通信,采用电机驱动模块使电动推杆动作。
推广应用价值:
我国丘陵山地分布范围广泛,其耕地面积、农作物播种面积均占全国的1/3,但目前该地区的农业机械化水平严重滞后,作业过程中要实现姿态调平来保证农机的安全性及作业质量。本项目研发的农机底盘自动调平系统采用电力驱动,结构简单,容易实现自动控制,有助于增加农机在坡地行驶的稳定性,提高机具的安全性能和作业质量, 能够满足丘陵山地机械化作业的需要,具有较好的推广应用价值。
作品视频: