作品展示
作品展示 > C类:企业出题类 > C2智能种植农业装备发明
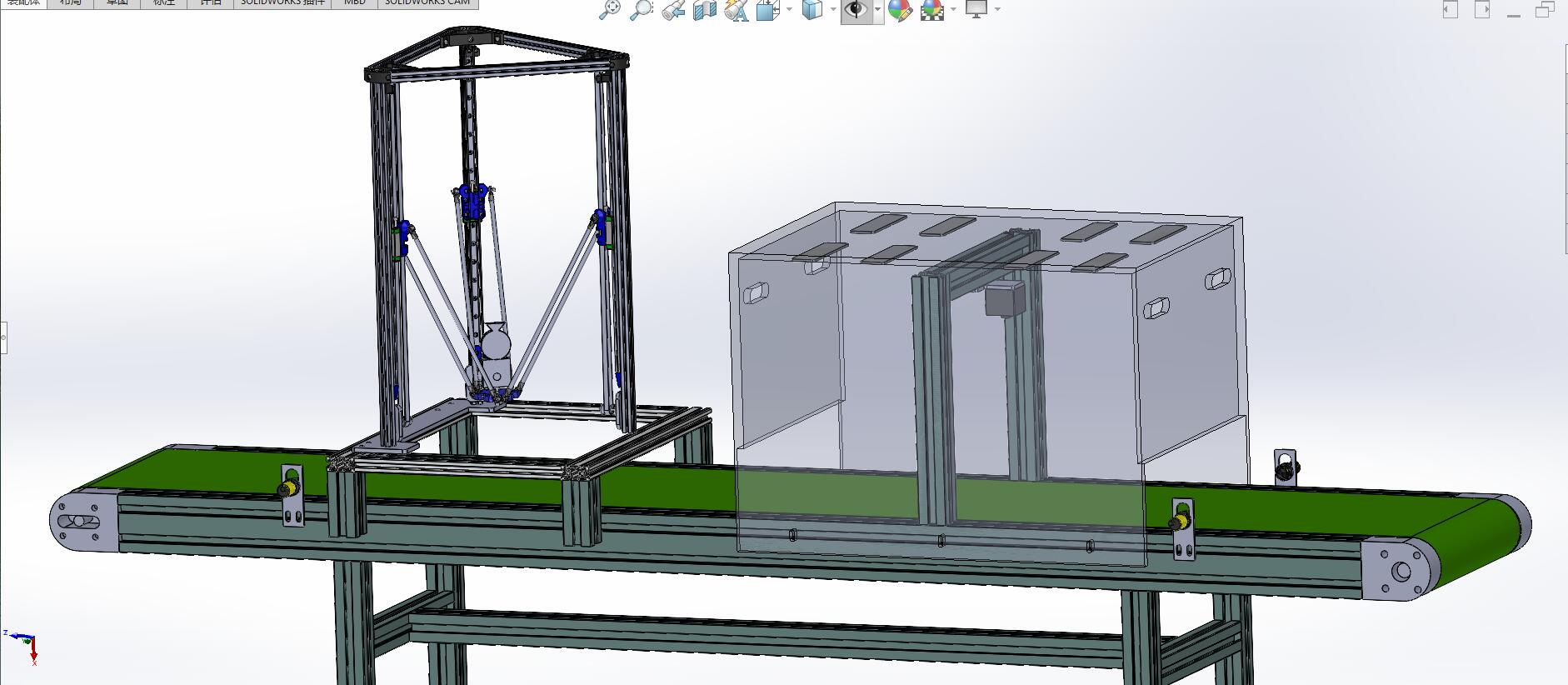
蔬菜育苗穴盘播种漏播检测补种装备
- 作品编号:2024C4002
- 所属领域:C2智能种植农业装备发明
- 作品层次:本科生
- 所在高校:华中农业大学
- 所在院/系:工学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机,实物模型
- 制作成本估算:0.8783万元
作品简介:
针对当前蔬菜穴盘育苗播种仍存在5%漏播率的问题,同时考虑到人工检查补种的低效与不便,本项目拟设计一种蔬菜育苗穴盘播种的自动漏播检测与智能补种装备,实现蔬菜穴盘育苗播种全覆盖。该装置主要由漏播检测装置、并联机械臂、补种盘及整机控制系统构成。漏播检测系统工作过程为由红外传感器精准定位穴盘位置,搭建的基于YOLOV系列深度学习算法的漏播检测系统,进行空穴位位置阵列准确检测;补种装置工作过程为并联机械臂接收空穴位置信息,搭载补种盘共同完成补种任务。该装置可实现传送带静态/动态两种情形下的漏播检测与补种,漏播检测精度高,补种准确性和流畅度高。
主要创新点:
1.基于深度学习算法对空穴位进行动态漏播检测,提高检测精度
基于YOLOV系列深度学习算法进行动态漏播检测,提高检测精度。结合自动学习特征实现精准空穴目标识别。
2.基于空穴阵列分布的路径规划算法,提升补种实时性
针对检测的空穴阵列分布,基于Dijkstra算法进行空穴排布路径规划,实现动态补种,增强补种实时性。
3.实现传送带连续作业的穴盘精准流畅补种
设计灵巧并联机械臂和特制补种盘结构,提升补种流畅度,保证准确性,降低重播率。
技术关键和主要技术指标:
1.基于深度学习的蔬菜种子漏播检测算法研究与设计
设计漏播检测装置,采用传统图像处理与YOLOV深度学习方法,精准识别穴盘复杂背景下的蔬菜种子,确定漏播空穴位置。
2.并联机械臂补种结构设计和路径规划算法研究
根据空穴位置阵列信息,基于机械臂运动学特性和穴盘分布规律,研究机械臂补种路径规划策略,进行高效精准补种。
推广应用价值:
(1)针对穴盘的漏播补种装置在国内比较少见。设计的该装置可应用到穴盘播种作业中,解决穴盘播种仍存在5%漏播率的问题,实现播种率达到100%。
(2)该蔬菜育苗穴盘播种漏播检测补种装备中的动态空穴识别技术与高效的并联机械臂补种机制,能够大幅提升整体播种作业的效率与精准度。
(3)该装置制造成本较低,能满足国内中小企业需求。
作品视频:
no video files