作品展示
作品展示 > C类:企业出题类 > C4智能收获农业装备发明
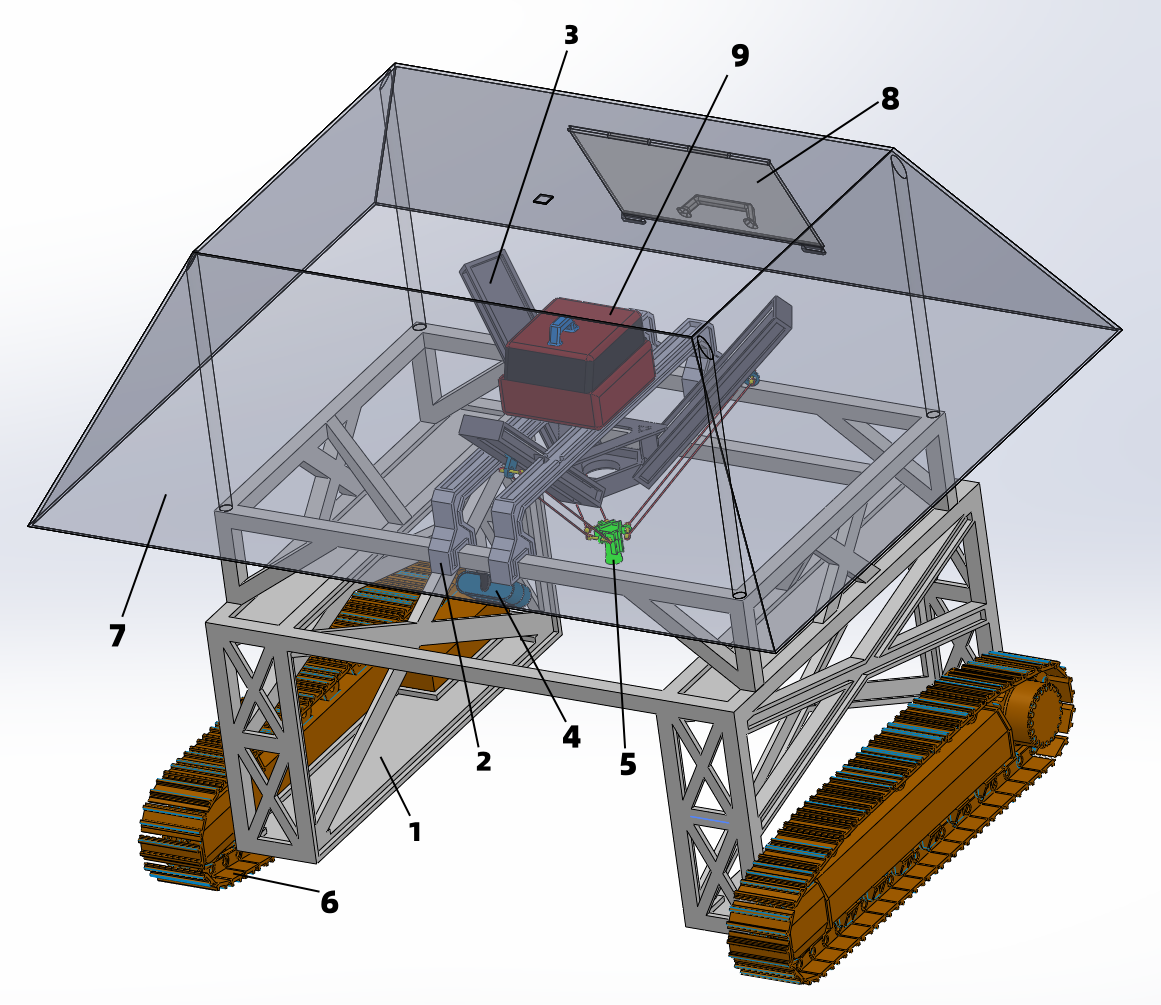
茶叶自动识别采摘机械
- 作品编号:2024C4004
- 所属领域:C4智能收获农业装备发明
- 作品层次:本科生
- 所在高校:广东技术师范大学
- 所在院/系:数据科学与工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:虚拟概念模型,软件
- 制作成本估算:3万元
作品简介:
为开发一种能自动识别成熟茶叶并进行精准采摘的智能机械设备,以提高茶叶采摘效率和质量,在视觉识别系统上,我们将采用深度相机实时捕捉茶树图像,并运用改进的YOLOv11算法进行茶叶嫩芽检测训练并计算采摘点;在茶叶采摘模块,我们设计了采摘机械手、 3P-Delta机械臂以及主控系统进行茶叶采摘。在机械移动系统方面,我们将采用电机供电控制履带运动,通过编程设计控制、设置CAN盒等,来实现机器人的蓝牙控制运动,自动循迹,避障等功能。在动力系统方面,我们将采用可充电电池来确保机械长时间作业。在收集系统方面,我们将采用剪切后使用负压收集装置至储备箱的方式进行茶叶收集。在操作系统方面,我们将采用APP、PC端进行机械自动采摘及人工控制采摘。
主要创新点:
1.在不利于采摘的环境下,我们结合我们自主研发的茶园监测系统,对茶叶自动识别采摘机械进行返航路径规划。
2.在识别环境不理想的条件下,我们采用自动调节光照系统,将识别的光照环境,控制在理想范围内,实现识别精确度的提升、应用环境的扩大。
技术关键和主要技术指标:
识别模块:对原始茶叶嫩芽图像进行预处理,包括图像预分割、数据增强等操作,减少背景干扰并增强模型的泛化能力,构建高质量的茶叶嫩芽数据集,通过精确标注和合理划分,确保模型训练的有效性。通过这些步骤,YOLOv11算法能在实时检测中实现对茶叶嫩芽的精准识别和定位。
机械臂采摘收集模块:深度相机将茶叶嫩芽的像素坐标转换为世界坐标,确定采摘点位置。通过K-means聚类算法按采摘区域个数划分嫩芽图像,形成多个采摘区,采用改进的遗传算法优化各区内采摘路径,得出最佳采摘路线。处理器通过数字通信接口与舵机驱动模块相连,发送指令控制机械臂移动[5]。当机械臂末端到达茶叶嫩芽上方,利用负压使叶片聚拢进入导管,并通过收缩圆弧形刀片剪切茶叶,同时负压将茶叶吸入收集箱。
行动模块:采用路径规划技术,基于二维地图使用改进萤火虫算法优化从起点到终点的路径。电机驱动履带运动,通过变速箱将动力传递至驱动轮,再由履带接触地面推动机器人前进。
推广应用价值:
提高效率:大幅提升采摘速度,减少人力需求,解决劳动力短缺问题。
质量保证:通过精准识别和采摘,确保茶叶品质一致性,提高产品价值。
统一管理:通过我们自主研发的茶园监测平台,对茶叶自动识别采摘机械进行整体部署,减少后期茶园设备研发、管理难度以及维护难度。
成本降低:长期使用可显著降低生产成本,提高茶叶产业竞争力。
应对气候变化:能在不同天气条件下以不同的机械工作状态进行工作,减少采摘对天气的依赖。
作品视频: