作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A3智能田间管理农业装备发明
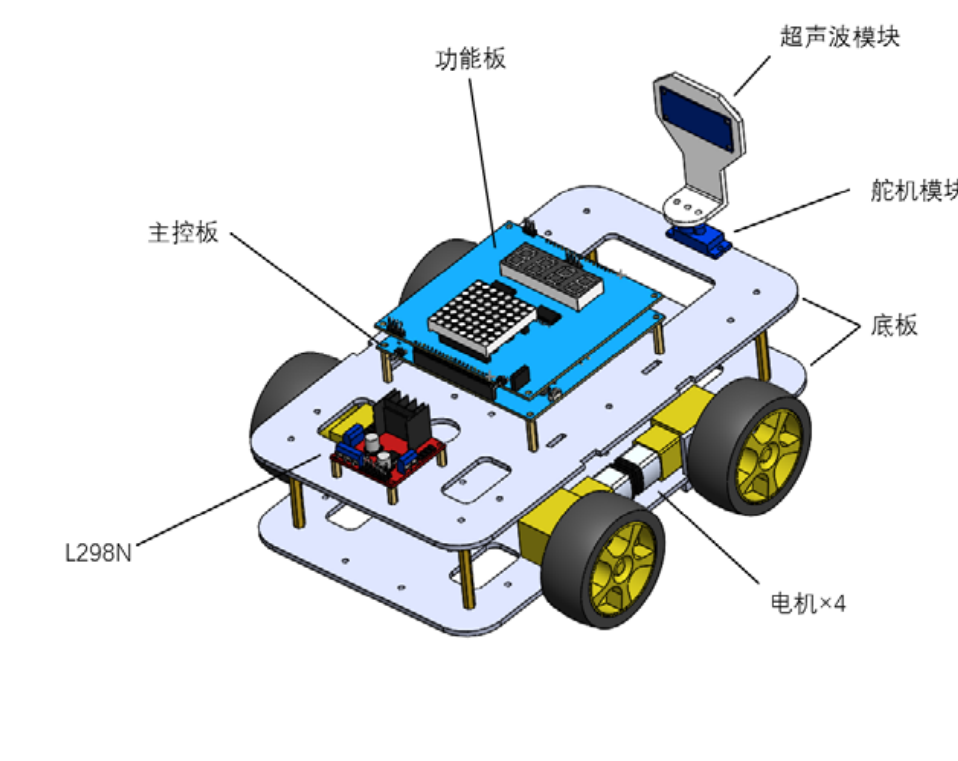
超声波巡检机器人
- 作品编号:2024A4031
- 所属领域:A3智能田间管理农业装备发明
- 作品层次:本科生
- 所在高校:泰州学院
- 所在院/系:机电工程学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:样机
- 制作成本估算:2万元
作品简介:
巡航机器人是一种能够在特定区域内进行自主巡航、监测和执行任务的自主移动机器人。它配备了各种传感器和导航系统,可以在没有人类干预的情况下自主移动和工作。巡航机器人通常配备多种传感器,包括激光雷达、摄像头、红外线传感器等,用于感知周围环境,同时也具备路径规划和避障能力,可以根据环境变化自主调整路线,避开障碍物。部分巡航机器人还具备人机交互能力,能够和人类进行简单交流和协作。
主要创新点:
机器人功能包含传感器、驱动和人机交互。为了满足对超声波传感器的测量数据机器人的运行状态的实时显示,添加数码管和双色点阵作为人机交互的设备,由于体型过大,因此功能板无法搭载更多的功能,因此为其他功能和外部模块提供插针引脚。
技术关键和主要技术指标:
巡航机器人的设计主要包括通过手机蓝牙远程连接机器人,使用蓝牙串口传输控制信号,以实现不同的控制方式。在该设计中,可以选择手动控制模式或自动控制模式,来控制机器人的移动和避障。 在手动控制模式下,可以通过手机与机器人进行蓝牙连接,并发送相应的控制信号。这些控制信号可以包括机器人的前进、后退、左转、右转等指令。机器人接收到这些指令后,可以即时响应并执行相应的动作,实现期望的机器人移动。机器人还可以根据超 声波传感器的测定数据进行速度的调节。通过测定与障碍物的距离,机器人可以实时调 整移动速度,以保持安全距离并避免碰撞。也可以根据实际需要手动调节机器人的速度,以适应不同的环境和任务。 在自动控制模式下,机器人具备自主巡航和避障能力。通过超声波传感器获取环境中的障碍物信息,并根据预设的算法规划出最佳的移动路径。机器人可以自主避开障碍物,实现安全、稳定的巡航。
推广应用价值:
通过手机与机器人的蓝牙连接,实现了远程控制和传输控制信号的功能。超声波传感器则提供了环境信息的获取,为机器人的移动和避障提供了辅助。通过对巡航机器人控制系统设计,用户可以方便地通过手机远程控制机器人,实现手动控制和自动巡航两种模式的切换,并通过超声波传感器实现移动速度调节和避障功能,提供了更加灵活和智能的操作体验。这种新形势使得农业管理更加方便
作品视频: