作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A3智能田间管理农业装备发明
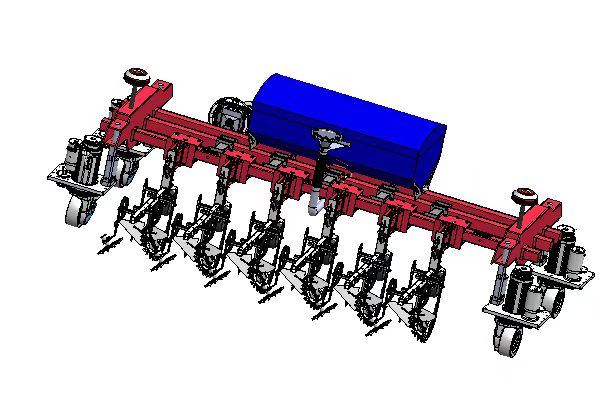
基于北斗路径规划的智能玉米中耕除草追肥机
- 作品编号:2024A4036
- 所属领域:A3智能田间管理农业装备发明
- 作品层次:本科生
- 所在高校:中国农业大学
- 所在院/系:工学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:实物模型
- 制作成本估算:0.7万元
作品简介:
所研发的机具能够基于玉米种植行的北斗地理位置信息,生成一系列机具前进的坐标点,基于这些坐标点,自主规划中耕除草追肥机作业路径。基于北斗路径规划的智能玉米中耕除草追肥机可根据路径规划的作业路线,在自主行走底盘的牵引和控制下,实现机具在玉米行中自动导航以及对行作业,确保机具能够精准地对每一行玉米,实现宽幅精准中耕除草追肥作业,减少伤苗率,减轻劳动强度。
主要创新点:
1. 利用北斗导航系统综合种-管两个机械化生产环节,实现从种的“种”行记录,到“管”的路径规划,在到机具自主导航和作业单体的自动对行,实现种-管的系统智能化作业,提高作业精度和作业效率。
2.研发了基于北斗卫星导航的通用行走底盘,其与玉米中耕除草机结合,实现了自主路径规划和智能化中耕除草追肥,可有效减少农药投入,有利于农业可持续发展。
技术关键和主要技术指标:
基于北斗路径规划的智能玉米中耕除草追肥机是一个实现了机具一体化的自走式装备。它搭载了一套具备路径规划、自动导航和自动对行等核心功能的智能控制系统,实现了机具在作业过程中的全过程自主作业。
在路径规划方面,系统深入分析和处理种植地块的形状、玉米种植行的分布等关键数据,完成路径规划任务,为机具在作业过程中生成一系列最优路径坐标点,指示了机具前行的理想路线。
在自动导航方面,北斗导航系统提供高精度的定位数据,能实时追踪机具作业时的位置。系统结合北斗以及机具自身配备的编码器、陀螺仪等多种传感器,来实时获取前进的速度、姿态等关键信息,用于校正机具行驶路线,实现自动导航。
在自动对行方面,系统借助北斗在玉米播种期间获取的精确播种行的位置信息,通过调节电推杆,实现对作业单体位置的精准调整。
推广应用价值:
1.该装备在获取相关数据后能够自动进行路径规划与路径坐标生成,整个作业过程自动化程度较高,减少人力成本。
2.该装备通过北斗卫星获取高精度的位置信息,结合自身的传感器进行控制作业,能够自动导航、单体对行,具有较高的作业精度。
3.该项目可以同时完成中耕除草追肥工作,提高了作业速度,从而提升了整体的农业生产效率。
作品视频: