作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A6智能产地初加工农业装备发明
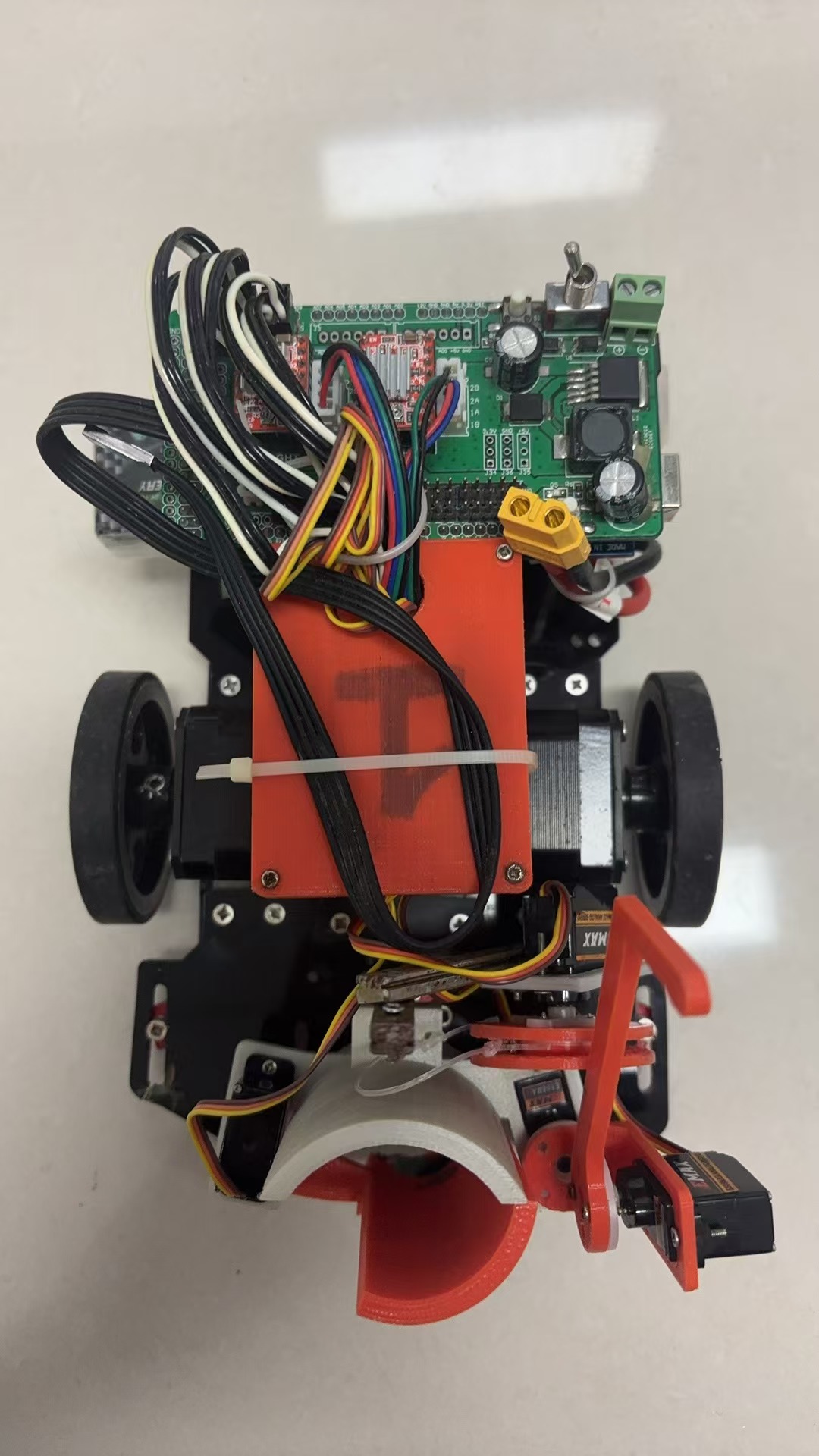
水果智能分拣搬运机器人
- 作品编号:2024A4069
- 所属领域:A6智能产地初加工农业装备发明
- 作品层次:本科生
- 所在高校:泰州学院
- 所在院/系:机电工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:0.3万元
作品简介:
水果分拣搬运机器人可以广泛应用于水果分拣领域。水果搬运机器人可以通过安装不同的末端执行器来实现各种水果搬运工作,极大程度上减轻了人力劳动。本作品设计的水果搬运机器人,采用了3D打印成型技术环保、高效打印机械结构,集合了机械、电气、控制、光学等模块。通过灰度传感器对地标路径进行导航以实现机器人自主搬运,对水果的颜色进行数据采集、对比、分析,配合RGB颜色传感器对水果颜色进行分析,实现水果种类的区分,利用相应的控制程序智能规划机器人的运行线路,以实现搬运机器人对水果的自动分拣、搬运和堆叠功能。通过对水果智能分拣搬运机器人的设计,极大地提高了工作效率。
主要创新点:
(1)通过灰度传感器对地标路径进行导航以实现机器人自主搬运;(2)对水果的颜色进行数据采集、对比、分析,配合RGB颜色传感器对水果颜色进行分析,实现水果种类的区分;(3)利用相应的控制程序智能规划机器人的运行线路,以实现搬运机器人对水果的自动分拣、搬运和堆叠功能。
技术关键和主要技术指标:
分拣搬运机器人整个系统由三个部分组成,机器人的机械结构部分、机器人的硬件部分、机器人的控制部分。基于机器人机械结构选用Arduino Mega 2560控制板、灰度传感器、颜色传感器,进行相应的动作任务检测、识别和控制,配合步进电机完成分拣搬运作业。
推广应用价值:
本作品从市场及用户的角度出发,设计的这款水果智能分拣搬运机器人能够对水果实行自动分拣、搬运和堆叠功能。通过对水果智能分拣搬运机器人的设计,极大地提高了工作效率。因此,本作品具有较高的推广应用价值,将会在园林等机械行业中发挥重要作用。
作品视频: