作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A5智能收获农业装备发明
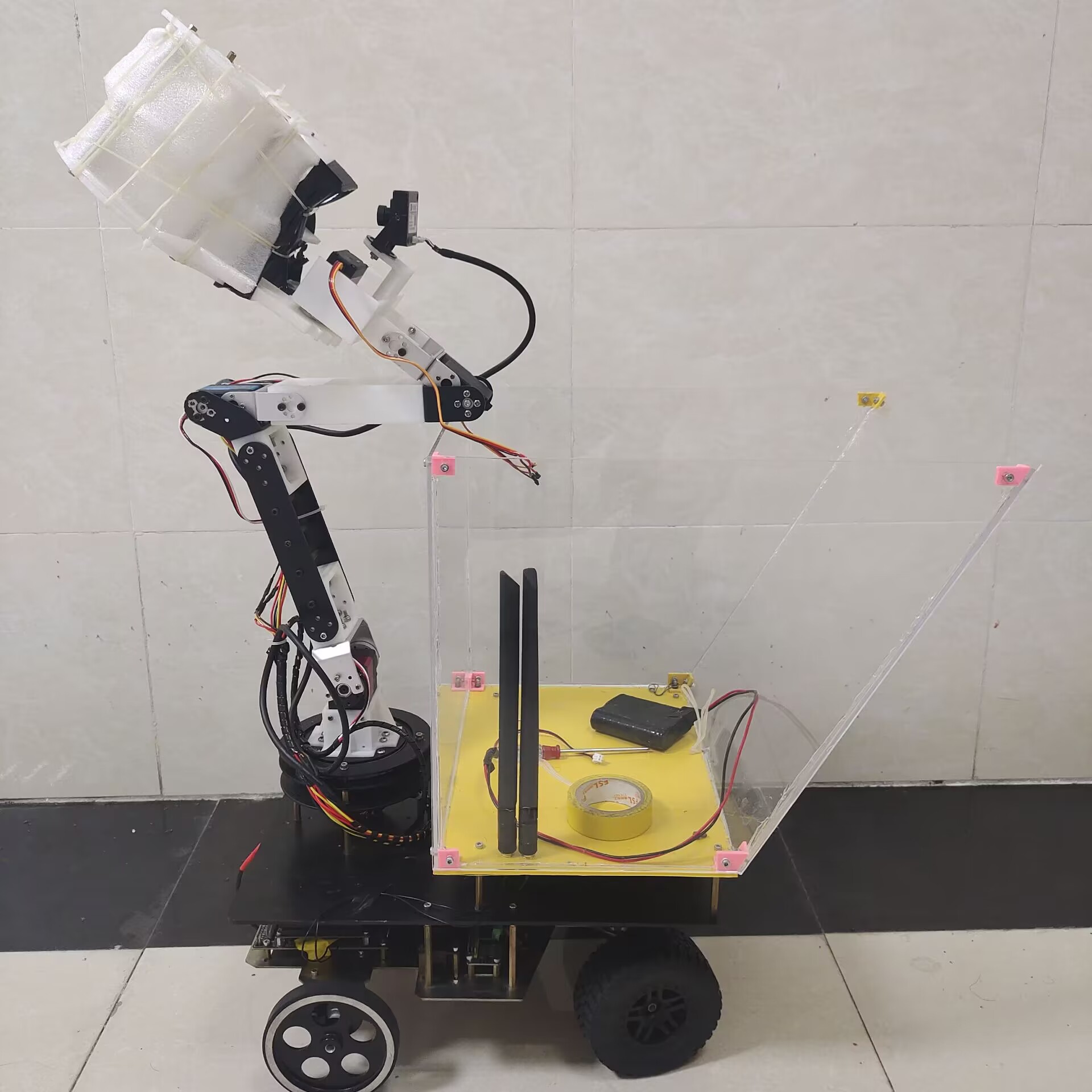
基于激光雷达与IMU融合的果蔬采摘机器人
- 作品编号:2024A4071
- 所属领域:A5智能收获农业装备发明
- 作品层次:本科生
- 所在高校:重庆文理学院
- 所在院/系:智能制造工程学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:样机,实物模型
- 制作成本估算:0.7929万元
作品简介:
本项目旨在结合当前市场需求,综合分析现有技术发展现状的基础上,通过创新设计采摘机器人,以满足日益增长的农业采摘需求。在机械抓的设计上我们考虑到不同种类的水果会有不同的形状、果皮特性,末端采摘装置不匹配将会导致采摘成功率、效率下降,面向机器人的自然生长条件下的果实的无损采摘,该方法从果实底部接近、旋转包络分离毗邻果实并抓取的末端执行器,采用末端执行器向上旋转方式分离果柄,有效解决了毗邻果实分离和无损采摘的问题。并设计以启动柔性驱动器作为其弯曲关节,用力学分析方法建立关节弯曲量及输出力与其内腔气体压力之间的数学关系,该方法能够准确抓住苹果,并具有很好的柔顺性。
采摘机器人设计成双层机构。机器人整体由四个电机驱动,通过底盘舵机正反转控制小车的转向。第一层放置驱动电机、电池、Jetson Nano控制板、电机驱动、降压模块、云台等电子元件。云台上面为单臂采摘结构,通过舵机驱动使云台旋转,达到上端机械结构旋转功能。舵机控制屈伸将机械手送到果实处,此时,机械手上安装的摄像头进行对果蔬进行颜色识别,并对目标进行对比后,机械手进行抓起,云台转动带动采摘机构将机械爪到小车后部的收集装置,将物体放入收集装置,完成采摘动作。
主要创新点:
1. 创新使用激光雷达与IMU融合定位技术,通过激光雷达识别感知环境,判断障碍物位置,再由IMU传感器进行姿态定位,无需安插虚拟边界,可根据实地情况实时进行机身姿态调整。
2. 通过ROS环境虚拟建模与多传感器融合实现精准路径规划与避障,并且采用Jetson Nano结合WIFI模块,可实现远程人工遥控操作,即使在信号缺失的情况下依然能自主工作8s。
技术关键和主要技术指标:
本项目通过市场调研,在结合目前市场需求,综合分析现有技术发展现状的基础上拟创新设计,采用“方案设计+系统组装+性能测试”的综合研究方法对采摘机器人展开系统性研发设计。
设计采摘机器人时,需要考虑以下几个关键设计需求:
(1)定位精度和灵活性:采摘机器人需要具备高精度的定位系统,以便准确识别和定位作物的位置。同时,具备足够的灵活性,能够适应不同形状和大小的作物,以提高采摘效率。
(2)感知和识别技术:机器人需要配备先进的感知和识别技术,能够准确识别成熟度、完好度等关键信息,以确保采摘的质量和效率。这可能涉及视觉、激光雷达、红外线等多种传感器技术的应用。
(3)机械结构设计:机器人的机械结构需要具备足够的稳定性和灵活性,以适应不同环境和作物形态的变化。同时,需要考虑机械臂的设计,确保能够准确、快速地完成采摘动作。
(4)智能控制系统:采摘机器人需要配备智能控制系统,能够实现自主导航、路径规划、动作协调等功能。同时,需要具备学习和优化能力,能够不断优化采摘策略,提高采摘效率和质量。
(5)安全性和可靠性:在设计采摘机器人时,必须考虑安全性和可靠性。机器人在作业过程中应避免对作物造成损害,同时确保自身运行安全,避免发生意外事故。
由Jetson Nano开发板作为主控制板,Jetson Nano是NVIDIA公司推出的一款基于GPU处理器的嵌入式开发板,专为人工智能(AI)和机器学习应用而设计。通过摄像头识别传输的图像来判断果蔬是否成熟,从而控制夹具,完成整个工作区采摘任务。机器人的偏移值由激光雷达进行实时反馈到Jetson Nano控制电机的转速,使小车尽可能的走直线且转正,而且Jetson Nano处理图像,传输坐标信息,运动学逆解算出舵机角度数据传入下位机控制着舵机、摄像头等其他传感器的执行。
推广应用价值:
果蔬采摘收获属于季节性、时效性较强的劳动密集型作业。目前我国果蔬采摘作业仍主要为传统的人工收获模式。对于这种传统的人工采摘模式,不仅劳动强度大,劳动力成本高,而且效率相对较低。尤其对于某些地方果园占地面积相对小,果蔬之间密度窄等情况,给果蔬采摘带来了非常大的困难。因此,实现果蔬采摘机械化、智能化具有重要的意义。
果蔬采摘机器人的研究开发,对于减轻农业从业者的劳动强度、解放农业劳动力和提高果蔬的集约化生产水平,都具有重要的意义。我国作为果蔬生产的大国,对其需求量也不断上升。
小型果蔬采摘机器人就是取代传统人工采摘模式的一套自动化设备。人工采摘劳动强度大,收获周期长,生产效率低,生产成本较高。随着计算机控制技术以及网络控制技术的发展,机械化、智能化的智能果蔬采摘正在逐渐成为农业机械发展的前沿。
作品视频:
no video files