作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A8其他智能农业装备
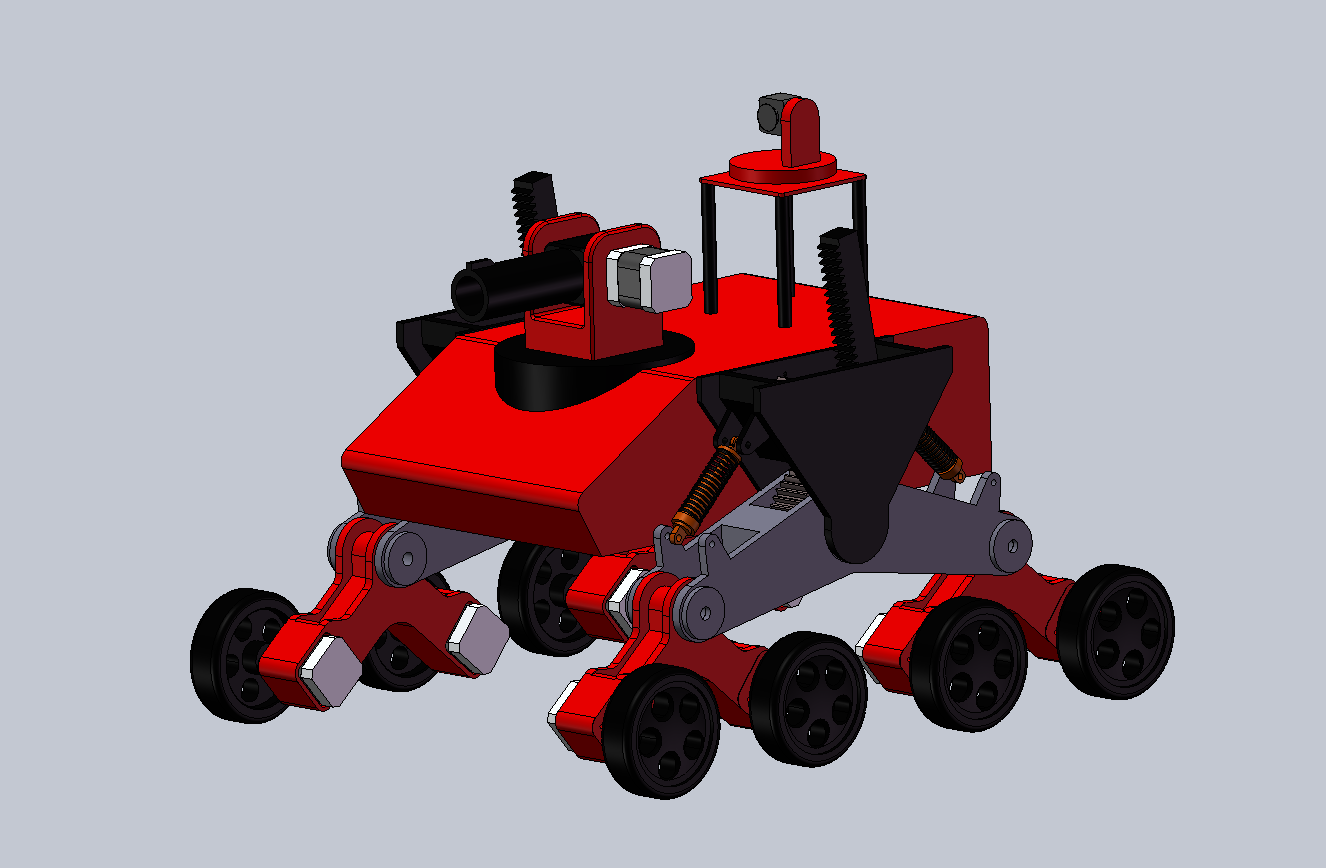
基于PID控制的复杂地形自适应助农机器人
- 作品编号:2024A4086
- 所属领域:A8其他智能农业装备
- 作品层次:本科生
- 所在高校:嘉应学院
- 所在院/系:物理与电子工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:软件
- 制作成本估算:10000万元
作品简介:
本项目研发了一款基于PID控制的复杂地形自适应助农机器人,创新点在于该机器人
能够根据不同的地形进行自适应调整,以保持自身平衡,使其能在不同的地形进行喷洒农
药施肥、检测土壤情况、作物生长情况等农业运作。此外,该机器人还配备了非常全面的
功能。
主要创新点:
结合多种传感器和算法,实现高效的环境感知与控制。机器人通过加速度计、陀螺仪、磁力计等传感器数据采集,结合卡尔曼滤波器实现精确的姿态测量和地形判断,能够自适应复杂地形,如陡坡和侧坡。PID控制算法确保机器人稳定行驶,翻转动作序列应对翻倒情况。GPS模块提供定位支持,摄像头结合YOLOv5模型监测作物生长。温湿度和光照传感器提供环境数据,通过MQTT协议将数据传输至OneNet云平台,实现数据存储与实时监控。该平台为农业自动化提供了稳定可靠的解决方案,未来将继续优化功能与性能。
技术关键和主要技术指标:
这款复杂地形自适应助农机器人采用了多项关键技术和创新设计,旨在解决传统农业机器人在复杂地形下的应用问题,推动农业现代化进程。机器人通过PID控制算法实现自适应地形调节,结合陀螺仪、加速度计和磁力计等传感器,实时感知地形变化,自动判断坡度和倾斜度,并调整行进速度和方向,确保在山地、丘陵等崎岖地形中的稳定性和安全性。此外,机器人还设计了一个8轮平台,通过主链接和子链接的连接方式,提升摩擦力,确保在不平坦的地形上稳定行驶,PID控制优化每个轮子的角度和速度,使机器人在面对坡道或复杂地形时保持最佳地面接触。
在导航方面,机器人集成了GPS定位系统,并结合IMU和卡尔曼滤波器,实现室外环境中的精准定位和导航,确保农业操作的准确性。通过高清摄像头和YOLOv5算法,机器人能够实时监测作物的健康状况,进行作物生长检测,及时发现病虫害或生长异常,辅助农民进行精准施肥和防治。这些技术的综合应用不仅提升了农业生产的效率,也减轻了农民的劳动强度,优化了资源利用,推动了农业现代化进程,为农业振兴提供了强有力的技术支持.
推广应用价值:
这款基于PID控制的复杂地形自适应助农机器人具有显著的应用价值,特别是在梅州市等山区和丘陵地带。其自适应地形功能使机器人能够在崎岖地形上稳定作业,解决了传统农业机器人无法适应复杂地形的问题,提高了农业生产效率。此外,机器人能够精准施肥、检测土壤和作物健康,减少了对化肥和农药的浪费,促进了资源的合理利用和环境保护。更重要的是,其低廉的成本使得广泛的农户能够负担得起,推动了农业现代化的普及,减轻了农民的劳动强度,优化了生产过程。这种技术不仅提升了农业生产力,还为梅州市等地区的乡村振兴和可持续发展提供了有力支持。
作品视频: