作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A6智能产地初加工农业装备发明
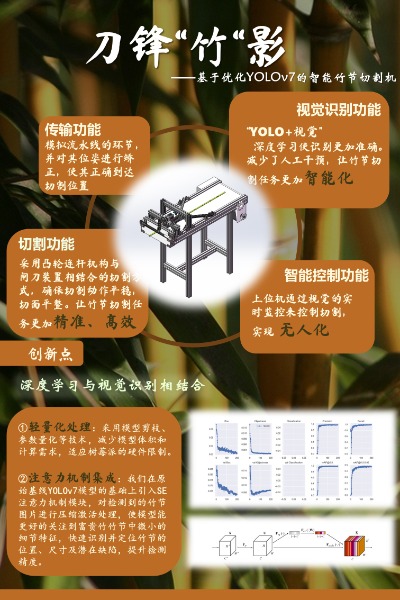
刀锋“竹”影——基于优化YOLOv7的智能竹节切割机
- 作品编号:2024A4091
- 所属领域:A6智能产地初加工农业装备发明
- 作品层次:本科生
- 所在高校:广东海洋大学
- 所在院/系:广东海洋大学机械工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:0.25万元
作品简介:
本作品推出了一款智能无人化竹节切割机,旨在为竹节切割任务提供更高效更智能的方案。以优化YOLOv7轻量化模型结合电控实现了竹节切割无人化智能化大发展。视觉的实时监控与电路的高效驱动,保证了切割的准确率以及灵活性,减少了对人工的依赖。在结构上,我们采用了凸轮连杆机构和闸刀装置,在保证切割速度的同时,提升了切割效率,借助高效的电控系统和灵活的硬件配置,机器能够适应不同规格的竹节,保证了切割精度的同时降低了误差率,并使切面更加平整。在操作方面,设备的智能化程度使得用户无需具备专业技能即可轻松上手。综上,我们所推出的智能无人化竹节切割机不仅降低了人力成本,提高了生产效率,还推动了乡村经济的可持续发展。
主要创新点:
本项目的主要创新点在于将深度学习与视觉识别技术应用于富贵竹的切割过程中。通过采用轻量化的YOLOv7模型,实现了对富贵竹竹节的实时检测与切割点识别,并引入SE注意力机制,使其能更好得捕捉竹节中微小的细节特征。此外,切割机构采用了凸轮连杆驱动方式,使得切割可以在传送带持续运转的情况下进行,避免了传统锯切或剪切方法的限制,同时采用了被动式姿态纠正装置纠正竹子进入切割区的角度,既提升了切割的效率和切面平整度,又降低了对竹子的损伤。为了适应树莓派的硬件环境,我们还对YOLOv7模型进行了剪枝和量化处理,从而降低了计算需求,提高了运行效率。
技术关键和主要技术指标:
本作品的关键技术集中在智能化切割系统的设计与优化,围绕精准、高效、无人化三大目标进行创新。首先,采用了优化的YOLOv7轻量化目标检测模型,通过视觉监控系统实现竹节的精准识别与定位,并动态调整切割路径,确保切割的精度和灵活性。YOLOv7模型的轻量化使得系统资源占用低,响应速度快,有效提升了竹节加工的效率。在机械结构设计方面,采用凸轮连杆机构与闸刀装置相结合的切割方式,确保切割动作平稳,切面平整。此外还设计了竹节纠正机构,保证了竹节以正确的角度进入切割区,减少了竹材损坏率,适合加工高强度的竹材。最后,智能电控系统是本设计的核心之一,通过高效的电路驱动,控制机械的运作节奏与功率输出,适应不同规格的竹材。结合无人化路径规划技术,设备能够自主完成从竹材识别、位置调整到精准切割的全流程,减少人工干预,降低了劳动强度。整个设计理念基于高效、节能、环保,力求通过先进的智能技术与机械设计,提供更加自动化、智能化的竹材加工解决方案
推广应用价值:
富贵竹作为湛江本地的特色产业,每年创造出外汇收入约1400万美元,呈现出强大的市场需求和潜在的经济效益。然而,尽管富贵竹的市场前景良好,其产业化的标准化程度仍显不足。现有的全手工生产模式不仅降低了生产效率,也制约了整体经济的发展。而本设备通过高度自动化和智能化,大幅提高了竹节切割的效率,减少了对人力的需求,降低了人工成本,适应了现代农业的生产需求。可以有效提升竹材产业的竞争力。
作品视频: