作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A8其他智能农业装备
温室果菜生产多功能导航底盘及配套机具
- 作品编号:2024A4097
- 所属领域:A8其他智能农业装备
- 作品层次:研究生
- 所在高校:山东农业大学
- 所在院/系:机械与电子工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:1.3万元
作品简介:
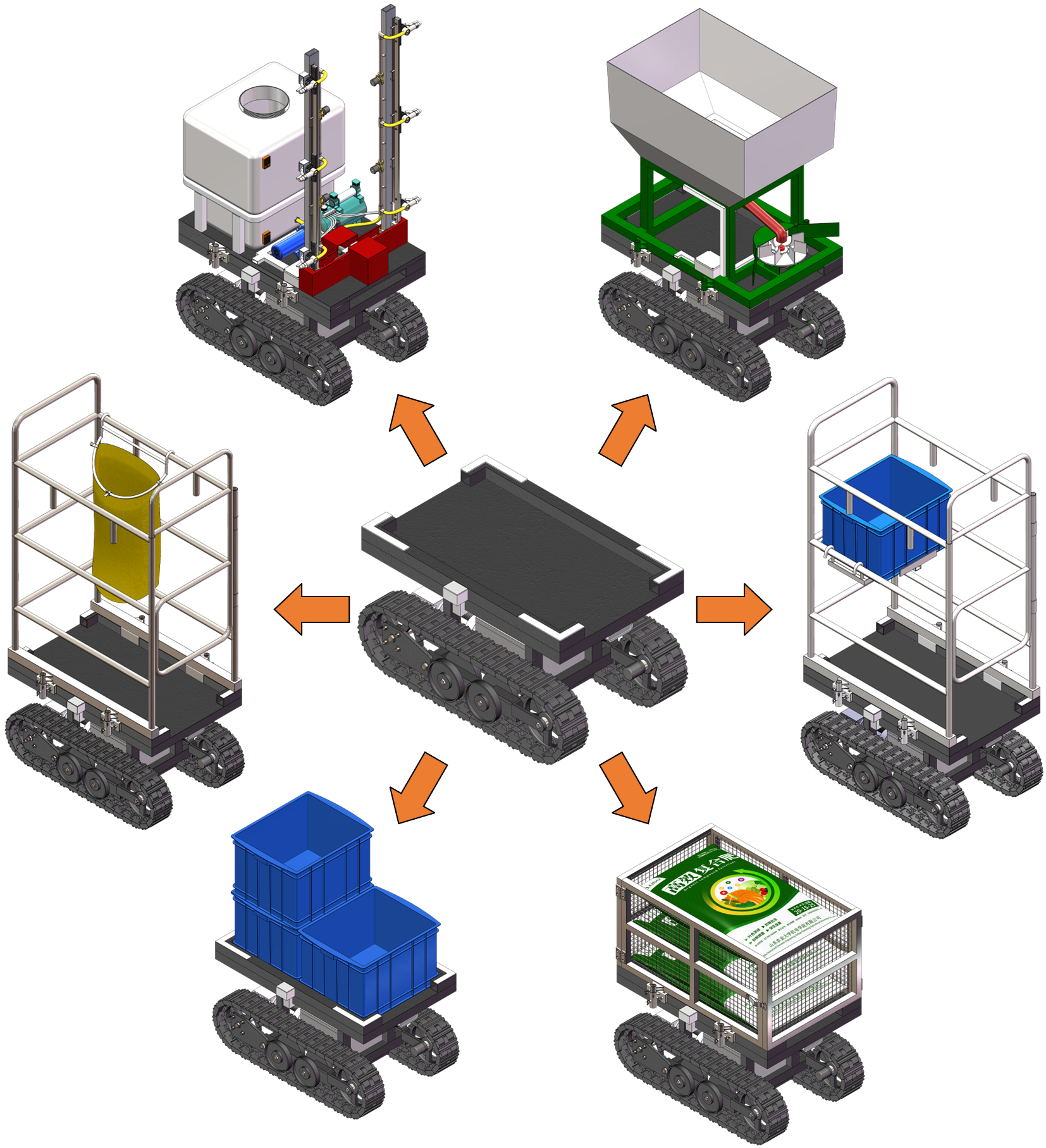
设计了一种温室果菜生产多功能导航底盘及配套机具。导航底盘基于SLAM(Simultaneous Localization And Mapping,即时定位与地图构建)技术,融合前后双激光雷达与编码器信息实现自主导航。配套机具包括喷雾机具、撒肥机具、运输机具以及辅助作业机具。其中喷雾机具采用基于风扰—摆动耦合的喷雾方式,并具备变距调高功能、液位检测功能以及喷头防抖功能。撒肥机具可实现肥箱流量、播撒速度等关键参数的自动化控制。通过机械接口与通信接口实现导航底盘与配套机具之间的快速拆装与通信,进而实现利用一台底盘完成叶面施药、叶面施肥、地面撒肥、农资运输、果蔬周转、整枝辅助、采摘辅助等多种作业任务。
主要创新点:
(1)设计了一种快速拆装与控制方案,实现了利用一台导航底盘实现多种作业任务。
(2)设计了一种基于风扰—摆动耦合的精准对靶喷雾机具,能够有效改善叶片背面以及冠层深处的雾滴沉积分布。
(3)设计了一种撒肥机具流量调节装置,实现了肥箱流量的自动化控制。
(4)设计了一种基于关键节点的固定作业路径规划方法,实现了温室喷雾与撒肥的无人化作业。
技术关键和主要技术指标:
(1)一机多用的设计思想。通过模块化设计与快速拆装方案,实现了利用一台导航底盘完成多种作业任务。节省生产成本的同时提高了温室装备调度效率。
(2)基于激光SLAM的自主导航技术。采用前后双激光雷达采集环境点云数据,并融合编码器信息,使用Cartographer算法即时定位与地图构建。依据温室环境地图,采用A*算法与动态窗口算法进行自由作业路径规划,并针对喷雾与撒肥作业场景,设计了一种基于关键节点的固定作业路径规划方法。
(3)配套机具结构创新。设计了一种基于风扰—摆动耦合的喷雾机具,能够有效改善叶片背面以及冠层深处的雾滴沉积分布,提高喷雾作业精细度。同时喷雾机具具备变距调高功能、液位检测功能以及喷头防抖功能,能够适用于温室内作物的不同种植间距与不同生长周期。设计了一种可实现肥箱流量、播撒速度等关键参数的动化控制的撒肥机具,提高了温室施肥作业的智能化水平。
推广应用价值:
本作品可适用于不同布局、不同作物种类和不同种植模式的日光温室,满足果菜生产过程叶面施药、叶面施肥、地面撒肥、农资运输、果蔬周转、整枝辅助、采摘辅助等多种作业任务需求。有助于提高温室果菜生产的效率、精度和自动化水平,同时降低人工劳动强度和生产成本。用户可以随着农业技术的发展和需求的变化,灵活增加或更换新型配套作业机具,而无需更换整个设备系统,具有较高的可扩展性和技术适应性。
作品视频: