作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A5智能收获农业装备发明
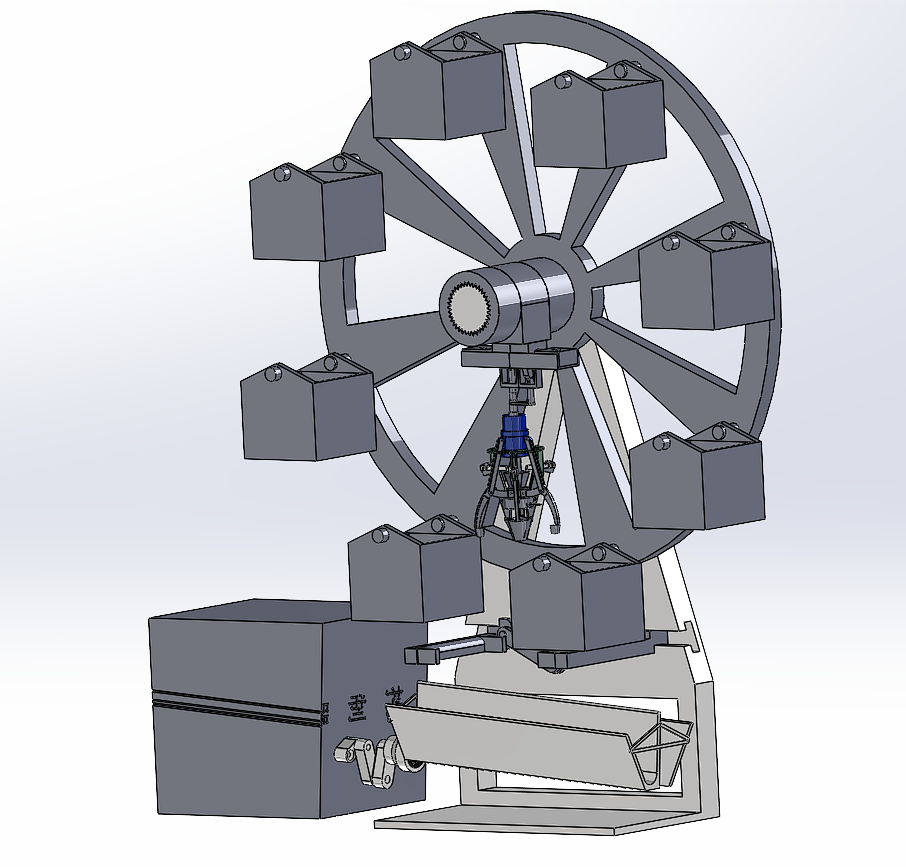
立体农业中胡萝卜自动收割机
- 作品编号:2024A4100
- 所属领域:A5智能收获农业装备发明
- 作品层次:本科生
- 所在高校:武汉科技大学
- 所在院/系:机械自动化学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:虚拟概念模型,软件
- 制作成本估算:1.5万元
作品简介:
本项目的核心目标是在垂直农业的基础上,创新一款高效、智能、低损的自动萝卜收割装置,旨在提高萝卜的收割效率,降低人们的劳动强度,减少人工成本,实现农业生产的现代化和智能化。同时,该装置具备出色的操作性和维护性,以适应不同品种、不同生长阶段的萝卜收割需求,为立体农业的繁荣发展贡献力量。
主要创新点:
①仿生机械爪智能化设计
②旋转支架与机械爪的协同
③萝卜与菜叶的分离技术
④分拣滑轨的创新结构
⑤整体设计集成化
技术关键和主要技术指标:
垂直农业因其高效、环保和节约土地资源的特性,正逐渐成为现代农业的璀璨明珠。萝卜是垂直农业中的重要组成部分,其收割效率对于提高整个农业生产体系的经济效益和可持续发展至关重要。传统的萝卜收割方式以人工为主,不仅劳动强度大,效率低下,而且随着劳动力成本的不断攀升,问题愈发凸显;面向垂直农业的自动萝卜收割装置可以解放人们的双手,提升农业生产的智能化水平,提高收割效率,降低劳动强度。
依据蚊子口器结构的启示,我们设计了一款集成松土、抓取、茎叶分离切割收集于一体的全自动机械爪,并将其与形似摩天轮的框架相互配合,实现萝卜的无人采摘,随后萝卜与菜叶通过底部创新型V型滑轨分离,进入不同收集区域;装置从种植、收割到分拣都实现了自动化,提高了农业生产效率,各部分之间的协同工作也展现了集成化设计的优势。
推广应用价值:
面向垂直农业的自动萝卜收割装置的推广应用价值在于其能够显著提升农业生产的智能化和自动化水平。该装置通过旋转支架与机械爪的协同作业,实现了萝卜的自动收割,不仅提高了收割效率,还减少了人工操作的需求,从而降低了劳动强度和人工成本。此外,装置的仿生机械爪设计、萝卜与菜叶的分离技术以及分拣滑轨的创新结构,进一步提高了收获物的纯净度和处理效率。这些特点使得该装置能够适应不同品种和生长阶段的萝卜收割需求,为垂直农业的繁荣发展贡献力量。通过试验示范和推广,该装置有望提高在立体农业中的应用普及率,促进立体农业的可持续发展,为农民带来实实在在的经济效益,推动现代农业向更高效、环保的方向发展。
作品视频: