作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A3智能田间管理农业装备发明
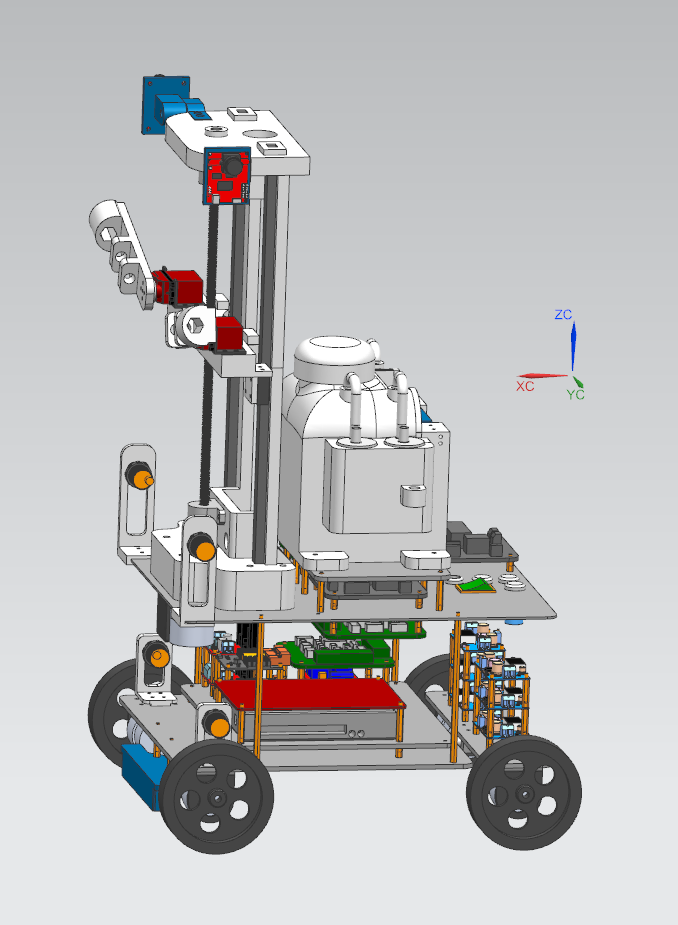
基于视觉识别的小型棚室喷药机器人
- 作品编号:2024A4103
- 所属领域:A3智能田间管理农业装备发明
- 作品层次:本科生
- 所在高校:重庆文理学院
- 所在院/系:智能制造工程学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:样机,实物模型
- 制作成本估算:10000万元
作品简介:
本项目设计了一种基于视觉识别的小型棚室喷药机器人,以myRIO 作为核心模块进行控制,通过轮式运动的方式,在大棚内实现自动喷药,以OpenCV为框架开发的CNN神经网络算法系统,通过十字架机构与舵机代替人工喷药,不但在机械结构和识别算法上具有自主创新性,而且可以通过双目摄像头来判断植物的受灾情况,并用十字架实现精准喷药。另外通过多种传感器配合,该机器人具有远端操控监视系统以及自动避障功能,操作更加便利,符合蔬菜大棚的环境需求。
主要创新点:
1.CNN算法对图像进行特征提取,从而识别出植物的种类、生长状态以及受灾情况
2.十字滑块丝杆机构喷药机构喷药喷药机器人最上层十字滑块丝杆机构作为支撑与升降结构达到多角度精准对植物进行喷洒
3.myRIO主控板搭载了在处理复杂任务时具有出色的性能和灵活性能够实现对特征点的匹配、三维重建
技术关键和主要技术指标:
关键技术:
myRIO 作为核心模块进行控制,以普通轻型小车作为运动载体通过myRIO对光电传感器进行控制达到避障效果,并对四周的灰度传感器的调配达到小车调整。
基于myRIO视觉图像处理以及OpenCV为框架开发的CNN神经网络算法系统对植物进行颜色、识别定位追踪,可不同程度对杂草等目标进行喷洒农药,决定了后续植物空间三维定位的精确度。
运用OpenCV图像处理,myRIO实现对特征点的匹配、三维重建下位机控制器能通过串口接收来自myRIO的三维坐标信息及采摘信息,并能将植物的空间三维坐标转化为喷药机械手的空间三维坐标。
设计理念:
本设计还对三维旋转台类型和长度进行选取并组装,选取合适的驱动器及配套的驱动电源,利用控制器实现对旋转台的控制,同时选择合适的喷药机械手并对喷药手进行改装设计及合适的舵机驱动器并利用下位机控制器实现对喷药机械手对目标的植物达到精准喷药,同时本设计还需对旋转云台限位传感器和喷酒机械手接触传感器进行造型和设计等。
推广应用价值:
相比于市场上的其他喷药机器人在作业时存在喷灌装置喷洒范围难以控制、喷药工作不能精准定位等问题,本团队设计的小型棚室喷药机器人具有识别与判断能力强,喷药效率高的优点,这得益于独特的机械结构以及CNN算法对图像的处理,使得机器人可以精准的对不同受灾情况的农作物实现不同程度施药。本产品适用于多功能,大规模的农场,品类繁多,地形复杂的果蔬种植场等场所。
作品视频:
no video files