作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A5智能收获农业装备发明
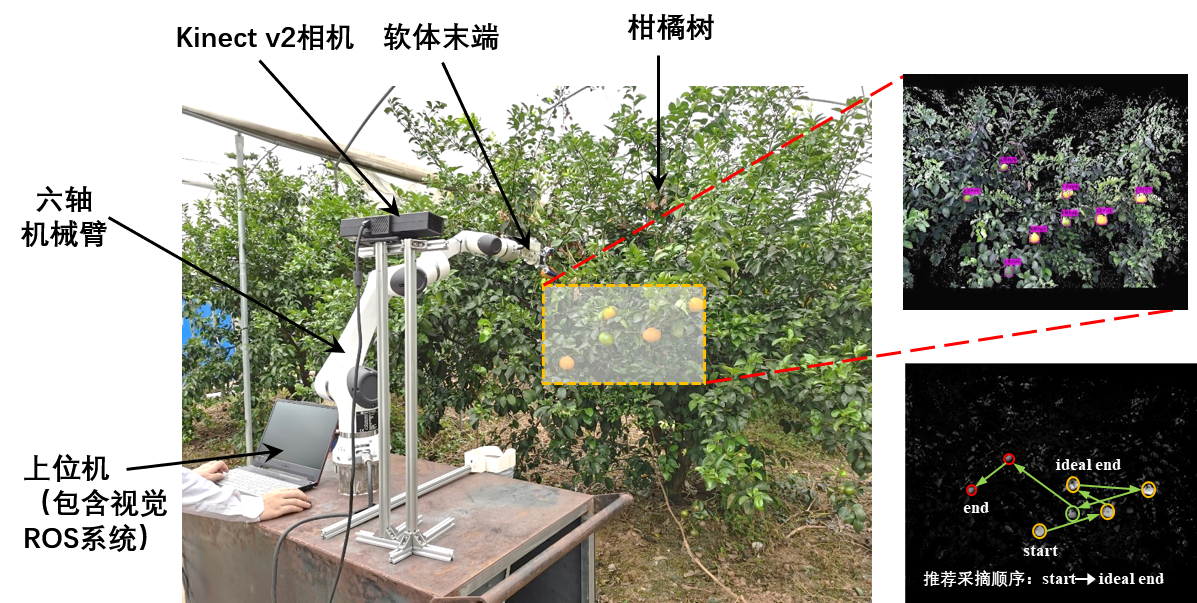
基于仿生视觉与柔性抓取的柑橘采摘机器人
- 作品编号:2021A0012
- 所属领域:A5智能收获农业装备发明
- 作品层次:研究生
- 所在高校:华南农业大学
- 所在院/系:工程学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:样机,实物模型,软件
- 制作成本估算:7.785万元
作品简介:
本作品实现了一种基于仿生视觉与柔性抓取的柑橘采摘
机器人,主要由采摘硬件平台、仿生视觉系统和软体机械末
端组成。首先,搭建采摘机器人的硬件平台,规划相机与机械
臂的相对位置。然后设计一种基于仿生视觉理论的水果采摘
顺序规划方法,综合考虑每个果实的品质和深度距离,根据
优先采摘品质好、距离近的原则,计算出一组果实采摘先后
次序。采摘机器人的控制系统接收到采摘次序对应的果实坐
标,利用 ROS 系统控制机械臂,上位机控制软体末端进行采
摘。
本作品通过设计仿生视觉方法开发采摘机器人类人思
维,使采摘机器人具有非结构环境下的决策能力,能够优先采
摘成熟度较高、品质较好的水果,促进优质果实更快向市场
流动,有效扩大果实产业利润空间。
主要创新点:
创新点一:基于仿生视觉实现水果采摘顺序规划,个性
化采摘优质水果。本作品设计了基于仿生视觉的采摘顺序规
划算法,将人脑认知机制移植于机器人,赋以类人化思维模
拟人脑认知决策的过程。
创新点二:自主设计仿生柔性末端,实现水果无损和高
效采摘。本作品设计的末端执行器具有刚柔结合的抓取结构。
利用柔性材料打印而成的仿生夹爪抓取较牢固,可自适应包
络不同外形的水果。
技术关键和主要技术指标:
设计理念:通过摄像头采集图像数据后对果实进行检查和定
位,得到抓取点坐标后通过 ROS 机器人平台发送到机械臂移
动。移动到采摘点后上位机发送信号到单片机,单片机控制
软体夹爪抓取水果、剪刀剪断果梗,最后移动回到初始点,完
成采摘。
关键技术:
① 果实识别与定位系统:
Kinect V2 采集图像信息,利用深度学习技术对树上果
实进行实时检测,根据实中心深度信息计算果实三维坐标,
完成果实识别与取点定位,并把坐标通过 ROS 系统发送到机
械臂。
② 机械臂及末端控制系统:
主要硬件是六轴机械臂和软体末端,接收到果实的三维坐
标后,由 ROS 系统进行运动规划和路径规划并控制机械臂执
行动作,软体末端由 STM32 单片机控制夹爪,执行采摘动作。
③ 剪夹混合式末端执行器设计:
本作品基于鳍条效应设计了仿生柔性夹爪,采用 TPU 柔
性材料,利用 3D 打印技术制作而成柔性机械手可自适应不同
尺寸、形状和重量的柑橘。夹爪上方安装气动剪刀,利用气压
驱动剪切机构快速切断果梗,对果实损伤小,采摘效率高。
推广应用价值:
本项目研究的智能水果采摘机器人将智能装备技术与采
摘方式深度融合,在模拟人工采摘的基础上,增添智能装备
具有的独特优势,为实现无人农场机器换人提供了可能性 ,
符合无人农场的基本特征,推广使用能够为无人农场的构建
打下坚实的基础。
未来消费者的个性化需求将主导采摘机器人的发展方
向,基于仿生视觉的采摘顺序规划方案恰好为个性化采摘服
务提供参考思路,加快了农业采摘技术服务时代的来临。
作品视频: