作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A3智能田间管理农业装备发明
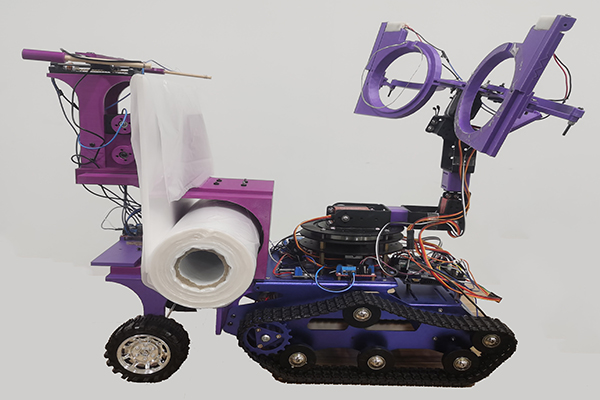
基于深度视觉的水果套袋机器人
- 作品编号:2023A2124
- 所属领域:A3智能田间管理农业装备发明
- 作品层次:本科生
- 所在高校:常州工学院
- 所在院/系:电气信息工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:0.1663万元
作品简介:
水果套袋是果树种植过程中的重要环节,这项操作繁琐、作业量大,目前主要采用的人工套袋方式,需要消耗大量的人力、物力,效率十分低下。
为解决上述问题,本团队研发了一款全自动智能水果套袋机器人。作品以STM32F103为主控核心,采用TOF深度摄像头与六自由度机械臂组成手眼追踪式伺服系统,实现果实的快速识别定位;底部采用履带式移动底座,使机器人能够在果园的复杂环境中自由移动;翻倒检测、电量监测、GPS定位、无线通信等辅助模块,可以实现在电脑端和移动端实时显示机器人的工作状态信息。
在实际使用时,操作者仅需坐在家中即可完成整片果园的套袋作业,不仅解放了农村劳动力,同时可为推进乡村农业现代化发展,建设社会主义新农村做出重要贡献。
主要创新点:
1.套袋机器人的视觉模块与机械臂组成PID手眼随动系统,能够使机器人快速定位果实位置。
2.基于深度图像的球形果实识别定位技术,使机器人通过深度图像从果实形态的角度识别出果实的具体位置,同时解决了果实遮挡问题和光照复杂环境的影响。
3.基于热封原理的套袋装置,使用电热丝通电加热,使其瞬间融化套袋以达到热封目的。
4.本作品可与Web服务器建立TCP协议通信,搭配有上位机交互页面,可通过电脑端或手机端登录使用。
技术关键和主要技术指标:
1.通过TOF深度摄像头实现对果实图像的采集,采用梯度向量对深度图像进行描述,以梯度向量图中散度极大值处定位到果实中心点的位置;采用了八方向搜索方法以灰度值、梯度值和梯度方向三者作为判别依据来搜索果实的边界点;将RANSAC算法用于果实部分点云的三维形状拟合,获取果实的拟合球形参数,最终实现果实的识别定位。
2.机器人的机械臂是由连杆和伺服电机组成的多输入多输出、高度非线性的复杂系统,使用时视觉模块将目标果实的空间坐标作为输入量发送给主控板,主控板计算得出机械臂各节点电机转角输出并作用于机械臂,使机械臂末端装置到达果实目标位置,实现机械臂手眼追踪系统的闭环伺服控制。
3.机器人与服务器建立通信方式采用TCP传输控制协议。利用HTML、CSS等编程语言制作机器人工作状态显示界面,然后调用MySQL数据库表单,利用AXAJ实现服务器界面的动态显示,完成整个机器人无线通信系统的实现。
推广应用价值:
2022年,我国苹果产量为4757.2万吨,产量稳居全球第一。苹果套袋可提高苹果产量和质量。人工套袋方式会消耗大量人力、物力,且效率低下。现有的苹果套袋机器人存在适应性差、精度不高、人机交互不便等问题。为解决上述问题,本项目研发的基于深度视觉的智能水果套袋机器人,具备全自动的水果识别、机械臂自动取袋、套袋等主功能和无线通信、实时定位、工作路径规划等辅助功能。此机器人的推广应用可推进人工智能在农业领域的发展。
作品视频: