作品展示
作品展示 > D类:概念设计类 > D1面向未来的智能农机设计
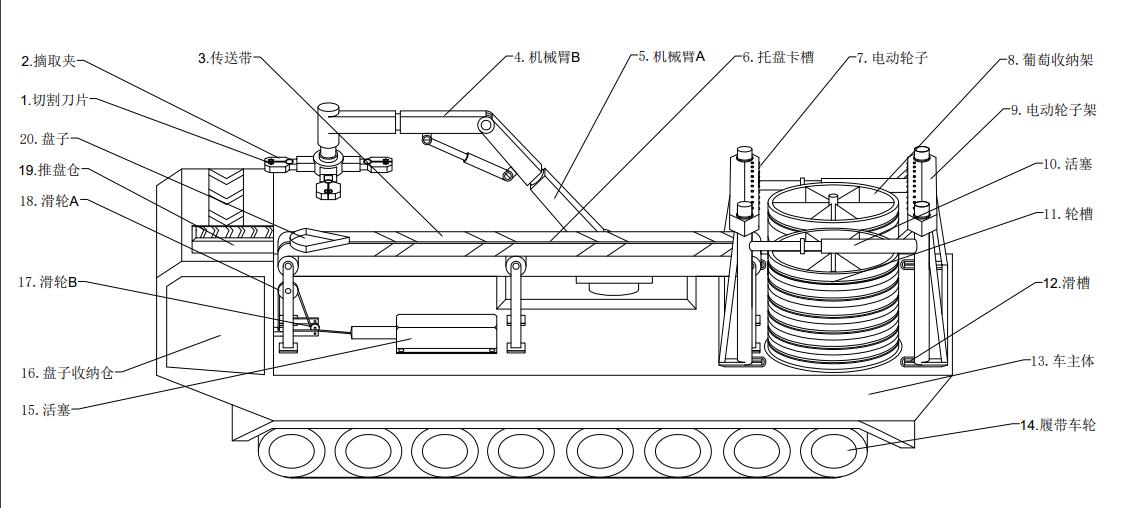
基于三维传感技术的葡萄智能采摘机器人
- 作品编号:2021D0217
- 所属领域:D1面向未来的智能农机设计
- 作品层次:本科生
- 所在高校:天津农学院
- 所在院/系:工程技术学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:虚拟概念模型
- 制作成本估算:1.2万元
作品简介:
本作品葡萄智能采摘机器人的发明创造旨在节省葡萄采摘过程的人力物力,提高采摘效率,促进葡萄行业的又好又快发展,保障农民的收益。本葡萄智能采摘机器人由智能识别系统,抓取剪切装置,传送系统以及收集装置等共同组成。葡萄采摘机器人采用单片机控制,同时载有wife模块可与手机连接实现远程控制、操作。在常规状态下,葡萄采摘机器人可进行自主采摘,节省人工,在较为复杂的采摘条件可辅以人工远程操控采摘,提高采摘成功率。同时,该葡萄采摘机器人的应用可提高工作人员的参与兴趣,吸引更多的年轻人投入到农业事业中。
主要创新点:
本智能葡萄采摘机器人不同于国外的大型葡萄采摘机械,国外的葡萄采摘机械采用脱粒采集,采摘仅适用于葡萄酒的酿制,本机器人适用于整串葡萄采摘,在采摘过程极为细致,不会导致葡萄破损,以更快的实现葡萄价值,更加符合我国国情。
在结构采摘方式创新仿造人工采摘制作剪切夹,刀具与夹具配合能够完整的将葡萄进行采摘,极大的保留葡萄价值。多部分配合的方式能够极大的收集葡萄,解放劳动力。
技术关键和主要技术指标:
剪切部分:在识别系统进行葡萄识别之后,抓取剪切装置自主控制系统进行路线规划,依照制定的路线进行抓取,在完成抓取动作后剪切装置进行动作,完成葡萄梗剪切工作。
运输部分:当剪切部分收回挡板后,使葡萄与挡板接触,挡板由初始竖直状态缓缓反转为水平状态,此时抓取装置松开,挡板缓缓下降,下降到最低位置挡板再次缓缓翻转将葡萄装入由推盘装置推出的特定扇形盘中。由传送带传送到盘架收集完成运送过程。
收集部分:收集装置主要对装满的盘架进行整理,使盘架分层叠放,减少搬运成本。
推广应用价值:
我国作为农业大国,随着农业的发展,农业机械化是必然趋势。目前国内外对葡萄的采摘主要收获葡萄粒方式为主,属于破坏性采摘,对完整性采摘的研究主要集中在实验研究阶段,研究的内容以图像处理和系统的控制实现为主,研究的对象主要为苹果为主的球形或者近似球形的水果,对蔬菜以及其他形状的水果采摘研究较少。本葡萄智能采摘机器人应用后能够实现葡萄的完整采摘,更加符合我国葡萄作为水果销售的国情。
作品视频: