作品展示
作品展示 > D类:概念设计类 > 智能农机和智慧农业创意设计
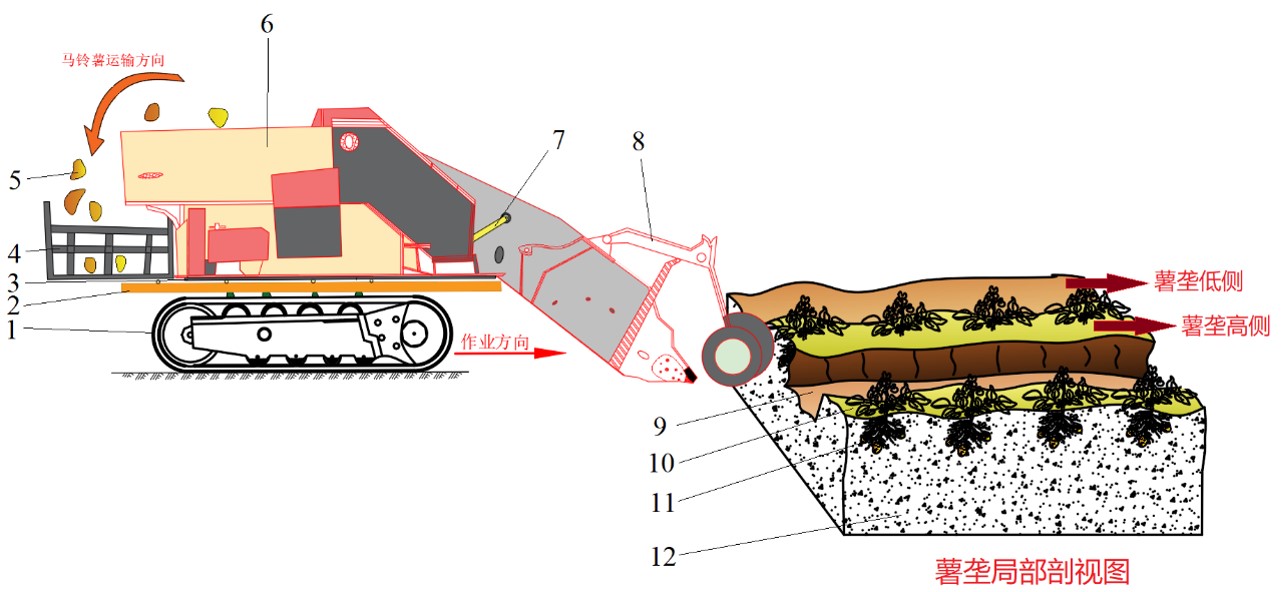
“山地拓荒者”—丘陵山地马铃薯联合收获机
- 作品编号:2023D2248
- 所属领域:智能农机和智慧农业创意设计
- 作品层次:本科生
- 所在高校:聊城大学
- 所在院/系:机械与汽车工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:虚拟概念模型
- 制作成本估算:2.5万元
作品简介:
本丘陵山地马铃薯联合收获机立足国家马铃薯机械化收获的重大现实需求,针对丘陵山区马铃薯联合收获“无机可用”、人工收获劳动强度大、作业效率低等问题,研究收获机履带底盘重心全向调整、坡地马铃薯高效低损挖掘、挖掘装置仿形收获等关键性技术,设计了底盘重心全向调整装置、坡地马铃薯高效低损仿生挖掘铲、研究挖掘装置姿态自适应调整方法,采取理论分析、仿真模拟和实地试验的方法开展相关研究。该机器的研发对于提高丘陵山区农机的发展水平,促进国家马铃薯的全面机械化具有实际意义。
主要创新点:
(1)针对坡地工况下收获机稳定性差,通过性差、对土壤碾压严重等问题,基于坡地马铃薯收获过程 “履带-坡地土壤”的互作耦合规律,设计了高稳定性山地马铃薯收获机底盘行走装置。
(2)针对坡地工况下,收获机履带底盘易发生侧滑失稳甚至倾翻的问题,深入开展履带底盘的稳定性理论分析,构建重心自适应调整装置的动力学模型以及自适应控制策略,设计了“横摆+纵移”式底盘重心自适应调整装置及控制系统。
(3)针对坡地薯垄破碎不均匀导致薯土分离不彻底问题,基于仿生技术和逆向工程设计了坡地专用高效低损低能耗马铃薯挖掘装置。
技术关键和主要技术指标:
该机器能够实现车身的实时自动调平,以此来满足丘陵山地地区的马铃薯收获工作。具体地,马铃薯联合收获机在工作前会将挖掘装置升起,到达作业场地后,通过挖掘装置姿态调节机构将挖掘装置落下,使两个松土限深轮落在薯垄两侧,将挖掘铲深入地面下方40cm左右;挖掘铲将土壤拱起,经输送筛分除杂装置将马铃薯运输到收获机的收集箱内,同时将石子等杂质去除。遇到上下坡时,纵向姿态调整系统会改变上下两层车架的相对位置从而改变机器的重心,以达到稳定行驶之目的。同时,丘陵山区马铃薯大多是沿着等高线种植,收获机工作时左右两侧地面高度不一致,所以此时横向姿态调整系统起作用,通过调节左右两个液压缸活塞杆的伸出长度来使上层车架保持水平状态,从而使收获机工作时处于稳定的状态。
推广应用价值:
丘陵山地马铃薯相对于普通收获机最大的不同点在于能够在丘陵山地这些地理环境复杂的区域满足正常的作业需求,目前平原广泛使用的马铃薯收获机难以适应于丘陵地形和黏重土壤差异下特殊的种植农艺,导致收获时分离效果差,伤薯率高,漏挖埋薯多,输送分离时机械损伤严重等问题明显,丘陵山地马铃薯联合收获的研发可有效缓解山区劳动力供需问题和“无机可用”的现实农机装备短缺问题,对于提高农民收入,促进丘陵山区农业的可持续发展具有实质价值。
作品视频: