作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A5智能收获农业装备发明
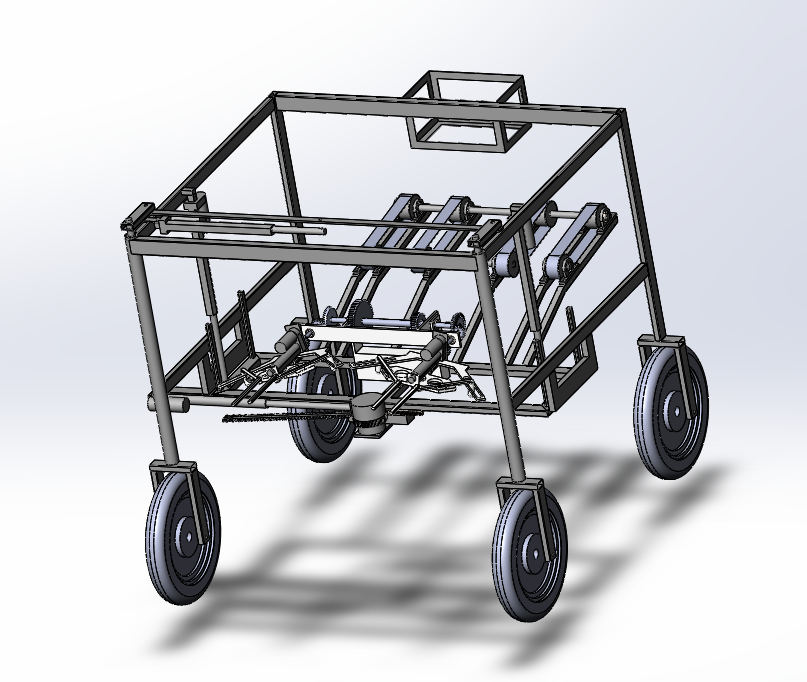
基于蟹钳结构的菜薹仿生夹持采收机
- 作品编号:2022A0830
- 所属领域:A5智能收获农业装备发明
- 作品层次:本科生
- 所在高校:湖南农业大学
- 所在院/系:机电工程学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:0.8万元
作品简介:
菜薹仿生夹持采收机是基于仿生蟹钳机械手和蟹钳架组成,所述的蟹钳架上安装有仿生蟹钳机械手,所述的机械手的活动端安装有软性材料用于夹持油菜菜薹,通过仿生蟹钳机械手来采收菜薹,能够完成精确的采摘工作,使其成为自动化的生产线,提高采收效率。田间作业条件复杂多变,目前国内采收菜薹主要是人工采收,需要耗费大量人工劳动力;采用批量机械化一次性采收作业,容易导致菜薹大小不一,需要后期人工进一步二次处理。运用仿生蟹钳机械手,将蟹钳结构应用到菜薹夹持采收作业中,可以较为精确的采收菜薹,并完成输送装箱环节,减轻劳动强度,改善劳动条件,提高采收效率以及质量。
主要创新点:
基于蟹钳结构的菜薹仿生夹持采收机主要由切割装置、仿生夹持翻转装置、输送装置等组成,一次性实现切割、输送、入箱。整机采用多挡位的设计及控制,实现了机器在不同状态和不同场地下的不同功能,并通过蓝牙驱动模块进行遥控控制,控制人只需站在田边进行微调,减轻农民压力。关键部件夹持翻转装置参照蟹钳结构进行仿生,采用液压技术实现蟹钳夹持功能。
技术关键和主要技术指标:
仿生设计主要是运用工业设计的艺术与科学相结合的思维与方法,从人性化的角度,不仅在物质上,更是在精神上追求传统与现代、自然与人类、艺术与技术、主观与客观、个体与大众等多元化的设计融合与创新,体现辩证、唯物的共生美学观。仿生设计的内容:模仿生物的特殊本领,利用生物的结构和功能原理来设计产品机械的设计方,本作品主要根据螃蟹的蟹钳来收割菜薹,模拟蟹钳动作形态。
推广应用价值:
依据菜薹多茬收割特点,研制一台专门收割菜薹的全自动化机械,提高采收效率,节约人力资源,降低成本,并促进相关产业的发展和进步。同时为突破我国油菜菜用产业发展的主要瓶颈,实现菜薹的机械化发展提供参考。在保证营养成分和食用品质良好的情况下,将仿真蟹钳机械手应用在采收机器中,提高采收精度,减轻劳动强度,改善劳动条件,提高采收效率以及质量,提高经济收益,对于油菜采用增效、农民增收,具有良好的发展前景。
作品视频: