作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A6智能产地初加工农业装备发明
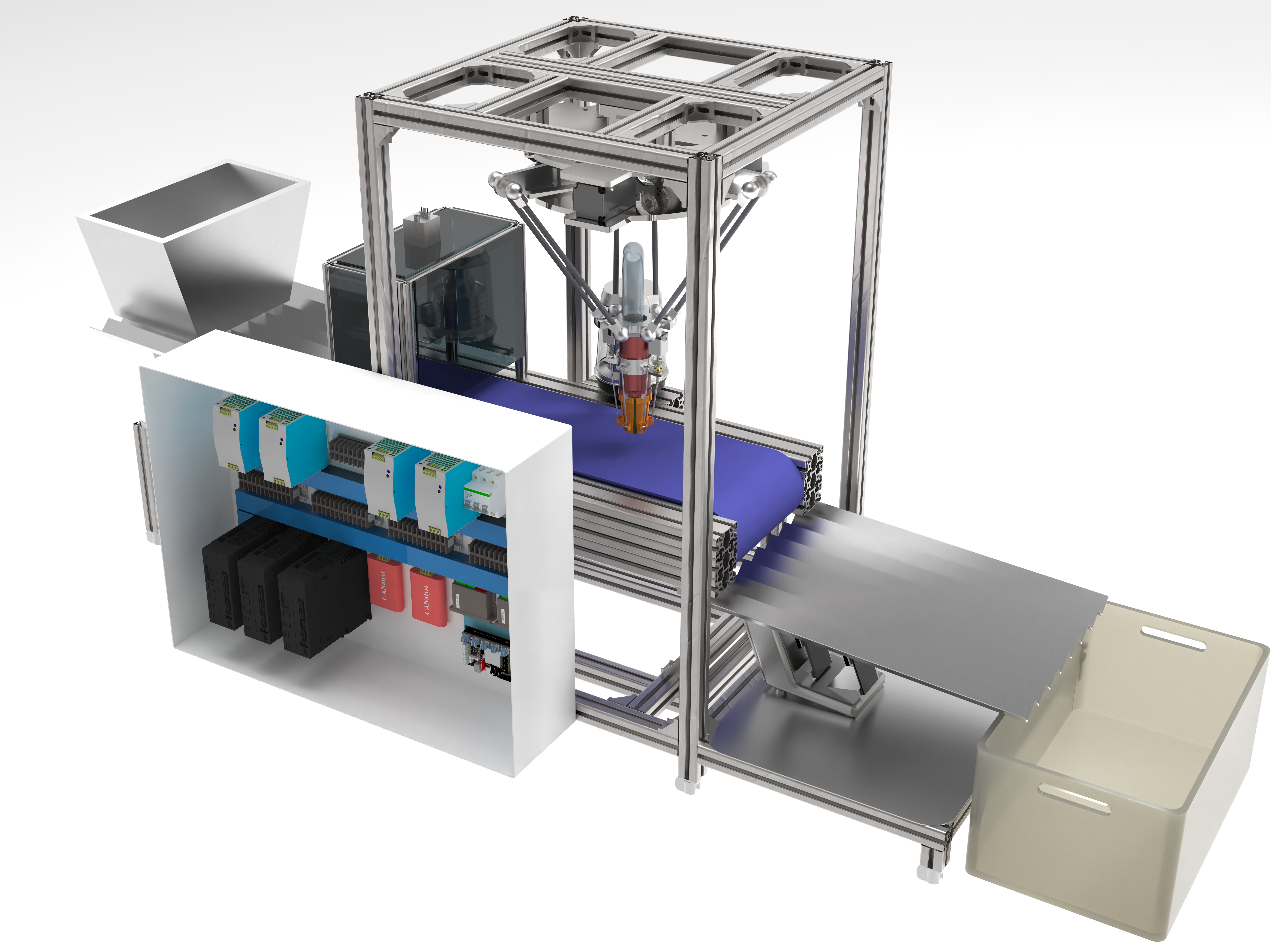
基于可变负压装置的名优茶杂质挑拣机器人
- 作品编号:2022A0978
- 所属领域:A6智能产地初加工农业装备发明
- 作品层次:研究生
- 所在高校:安徽农业大学
- 所在院/系:工学院
- 作品所处阶段:A、实验室阶段
- 作品展示形式:样机
- 制作成本估算:1.75万元
作品简介:
茶叶在加工中会产生大量杂质,目前名优茶精制生产线只能达到80%的除杂率,名优茶精制最后环节仍需要人工除杂。为了提高名优茶除杂准确率及效率,设计出一款基于可变负压装置的名优茶杂质挑拣机器人。建立了杂质重量预测及尺寸计算模型,并设计了一款负压口大小可变、负压压力可变的负压气吸装置,可根据杂质的尺寸及重量实时调节负压口及负压压力大小,在实现精准除杂的同时降低了优质茶叶被吸走量。同时,通过Simscape Multibody Link建立运动学仿真模型,并建立机械臂运动空间反解、茶叶杂质运动跟踪、机械臂S曲线速度优化、机械臂运行时间求解、及机械臂末端执行器3阶Bezier轨迹规划等一系列模型。单个杂质除杂时间平均为1.2s,实现了名优茶杂质的精准、高效剔除。
主要创新点:
设计了负压口直径、压力可调的负压气吸装置。建立杂质重量预测及尺寸计算模型,根据杂质的尺寸及重量实时调节负压口直径及负压力大小,除杂的同时降低了茶叶吸走量。使用Yolov5识别的杂质,杂质平均识别准确率在90%以上。建立了机械臂运动空间反解、茶叶杂质运动跟踪、机械臂S曲线速度优化、机械臂运行时间求解、及机械臂末端执行器3阶Bezier轨迹规划等一系列模型。实现在传送带运动下,单个杂质除杂时间平均为1.2s。
技术关键和主要技术指标:
关键技术:
(1)可变负压装置结构设计,以及负压口直径与负压力大小与杂质尺寸及重量匹配模型的建立。在最小的负压口直径及最小的负压力下,将杂质吸走,减少优质茶被吸走的数量。
(2)根据Yolov5建立多种类杂质识别模型。根据不种类杂质的形态学特征,建立不同种类的杂质预测模型,实现负压力与杂质重力精准匹配。
(3)本机器人建立了、杂质连续定位跟踪模型、S曲线优化下机械臂电机运行时间模型、杂质挑拣3阶贝塞尔曲线轨迹模型。实现杂质精准定位及连续化挑拣。
推广应用价值:
茶叶在加工中会产生大量杂质,目前名优茶精制生产线只能达到80%的除杂率。因此,名优茶精制最后环节仍需要人工除杂。但人工除杂存在精度低,劳动强度大,效率低的问题。目前市面上用于替代人工挑拣名优茶杂质的装备较少。本系统将深度学习结合高速Delta机械臂及可调负压装置实现了茶叶杂质高速、高精度挑拣。本装备的设计对于名优茶高效生产有着助推作用,为同类对品控要求较高的特色经济作物生产杂质剔除提供了新思路。
作品视频: