作品展示
作品展示 > A类:智能农业装备科技发明制作类 > A7基础零部件(液压部件、传动系、传感器、电驱动、导航等)
基于阻抗控制的传统拖拉机动力换挡升级智能系统
- 作品编号:2023A0839
- 所属领域:A7基础零部件(液压部件、传动系、传感器、电驱动、导航等)
- 作品层次:本科生
- 所在高校:南京农业大学
- 所在院/系:人工智能学院
- 作品所处阶段:B、中试阶段
- 作品展示形式:样机
- 制作成本估算:0.3万元
作品简介:
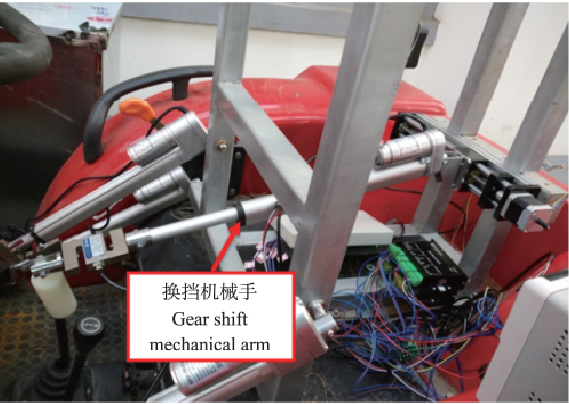
针对目前四轮农用拖拉机换挡器的特殊结构,设计了新颖的拖拉机驾驶机器人换挡机械手,通过机械手可以将拖拉机换挡操作杆的三维球面运动转换为二维直角坐标系下的直线运动,机械手可以沿X、Y 2个方向的运动来实现选、换挡。机械选、换挡是沿着x,y两个方向下进行的。因为在x方向下,换挡操纵杆在x方向的换挡阻力很小,并且选档的位置相对固定,所以,在这个方向下我们仍可以采用传统的位置控制;在y方向下,选档位置的重复性较差,并且换挡力是时变以及非线性,所以光靠单一的位置控制很难去完成效果较好的纵向换挡。在此前提下,构建了基于阻抗控制的传统拖拉机动力换挡升级智能系统,并通过电机的电流信号的EEMD检测判断换挡手柄是否成功入位。
主要创新点:
(1)将整个换挡过程中操纵杆端部的三维球面运动轨迹通过投影转换为二维平面中,机械手的末端执行器和换挡操纵杆的连接处在竖直方向的自由度不予考虑,从而将三自由度的空间球面运动转换为为二自由度的平面直线运动,通过这样的转换,可以大大简化运算,以及设计的难度,更容易得实现拖拉机两个方向的换挡动作
(2)通过测量电机电流,将机械臂末端与环境之间的接触力转化成位置信号,将这个位置的修正信号和期待的位置信号叠加,然后对位置信号用PID控制,就能实现对接触力/位置的同时控制,同时,通过模糊算法处理电流信号,对PID参数实时调整,实现自适应控制。
技术关键和主要技术指标:
本小组设计的基于阻抗控制的传统拖拉机动力换挡升级智能系统拟基于电流反馈信号通过模糊PID自适应控制策略实现换挡运动。通过检测实时电机电流,利用模糊控制规则在线对PID控制器的参数进行自整定,并基于EEMD技术进行换挡手柄的入位检测,当检测到操纵杆入位后立即停止电机驱动。模糊PID自适应控制器则以电机电流I和电流的的变化率I ̇作为输入,PID参数K_p、K_i、K_d的增量作为输出,来调整PID控制器的参数,控制电动推杆以提供一个与换挡时产生的阻力大致相等的阻力,保证机械手在换挡过程中的匀速运动,从而实现平滑的换挡控制。
推广应用价值:
针对复杂多变的农田环境,构建基于阻抗控制的传统拖拉机动力换挡升级智能系统,能够根据不同的换挡环境以及档位去实现平滑的换挡,并且通过反馈信号去实现入位检测,实现精准换挡,该控制方法可同样应用于拖拉机驾驶机器人的油门机械腿、离合机械腿、制动机械腿等其他执行机构中,在实际过程中有着很重要的应用推广价值。
作品视频: